

На Петербургском международном экономическом форуме 2024 г. президент РФ Владимир Путин поставил задачу войти в число 25 стран-лидеров по роботизации промышленности. При этом надо понимать, что роботизация ― не самоцель, а инструмент, который должен решить определенные задачи.
Какой опыт СССР надо учитывать, укрепляя роботизацию промышленности России? Насколько роботы универсальны? Кто должен координировать отрасль? Об актуальном состоянии робототехники, перспективных направлениях применения и исследованиях, которые проводят специалисты Института проблем механики им. А.Ю. Ишлинского РАН, рассказывает заместитель директора института по научной работе, ученый секретарь Научного совета по робототехнике и мехатронике РАН, профессор Российской академии наук Иван Леонидович Ермолов.
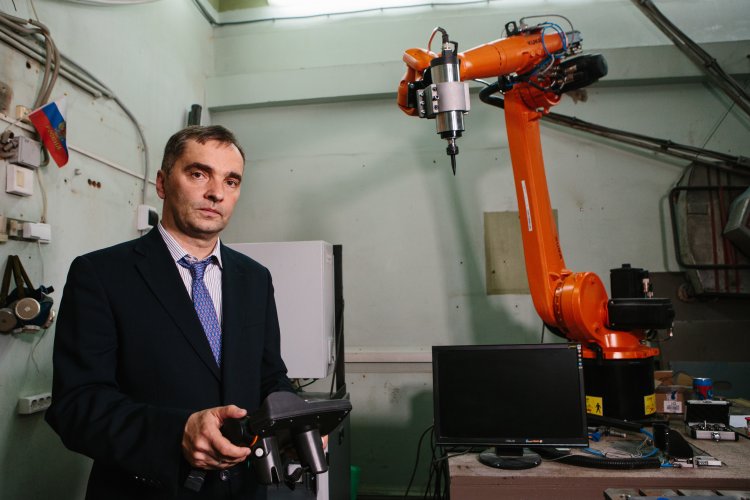
Иван Леонидович Ермолов
Фото: Ольга Мерзлякова / «Научная Россия»
― Чтобы выйти в число стран лидеров по роботизации промышленности, в России необходимо внедрить около 100 тыс. роботов. Какие задачи решает роботизация?
― Приступая к роботизации в современной России, надо в первую очередь учитывать опыт Советского Союза, в том числе негативный. Напомню, в начале 1980-х гг. ЦК КПСС принял Постановление о необходимости роботизации промышленности: была поставлена задача очень значительно увеличить количество роботов, применяемых в промышленности. Задача была выполнена, но зачастую директора заводов опирались формально именно на план роботизации. То есть устанавливали роботы на производства просто для факта внедрения. Я лично, будучи студентом первого курса, проходил практику на одном из машиностроительных заводов Москвы и видел роботы, которые были установлены, но не работали. Формальная задача постановления была выполнена, но не дала ожидаемого экономического эффекта.
В 1980-х гг. СССР был первой страной в мире по уровню роботизации, а сейчас мы ставим задачу войти только в топ-25 ― это немного грустная констатация ситуации. С другой стороны, сегодня роботизация промышленности ― это неизбежность. Во-первых, роботы дают стабильность качества и решают вопрос влияния человеческого фактора. Именно поэтому практически все автомобильные заводы роботизированы за исключением выполнения операций, которые возможно выполнить только с использованием ручного труда. Во-вторых, роботизация снимает многие границы производительности труда. Более десяти лет назад я был на одном из мясокомбинатов Москвы, где работали автоматы по упаковке сосисок. Автомат упаковывал 10–12 пачек в минуту. Люди, которые обеспечивали их работу, могли сделать максимум три упаковки ― очевидная необходимость установки роботов.
Помимо этого, робототехника позволяет решить проблему трудовых ресурсов: на нехватку кадров жалуются практически все руководители заводов. Мы видим подъем промышленности, но из-за того что долгое время не готовили достаточно людей рабочих специальностей, их нехватка значительна. Роботизация может расшить это узкое место, не прибегая к необходимости привлечения рабочей силы из-за рубежа. И еще один очень важный момент. Сейчас как минимум половина выпускников школ получают высшее образование: это стало определенным правилом хорошего тона. Но выпускник вуза зачастую морально не готов занимать простые рабочие места. А если пригласить его не условным сборщиком на производство, а оператором промышленного робота для сборки, многие с готовностью согласятся.
Это основные мотивы, которые предрасполагают Россию к тому, чтобы развивать промышленную робототехнику. Мы никуда не денемся от этого вектора.
― Чтобы внедрить робототехнику в уже налаженное производство, потребуется в значительной степени перестраивать промышленные линии. Это может стать проблемой?
― Конечно! Можно опять вернуться к советскому опыту: зачастую процессы изготовления продукции, спроектированные под ручной труд, пытались роботизировать. Ничего не получилось.
Другой пример: я был на одном из подмосковных заводов, где представляли образец, который руками собирали женщины. Меня спросили, можно ли роботизировать процесс. Я ответил, что в таком виде производство этой продукции, спроектированной под использование ручного труда, роботизировать невозможно. В той ситуации это было связано с тем, что с точки зрения тактильности человеческие руки гораздо более совершенны.
Необходимость перестройки производств, безусловно, остается и психологическим, и экономическим ограничивающим фактором внедрения роботов. И ряд продукции придется адаптировать под роботизированные технологии, иначе они будут бесполезны.

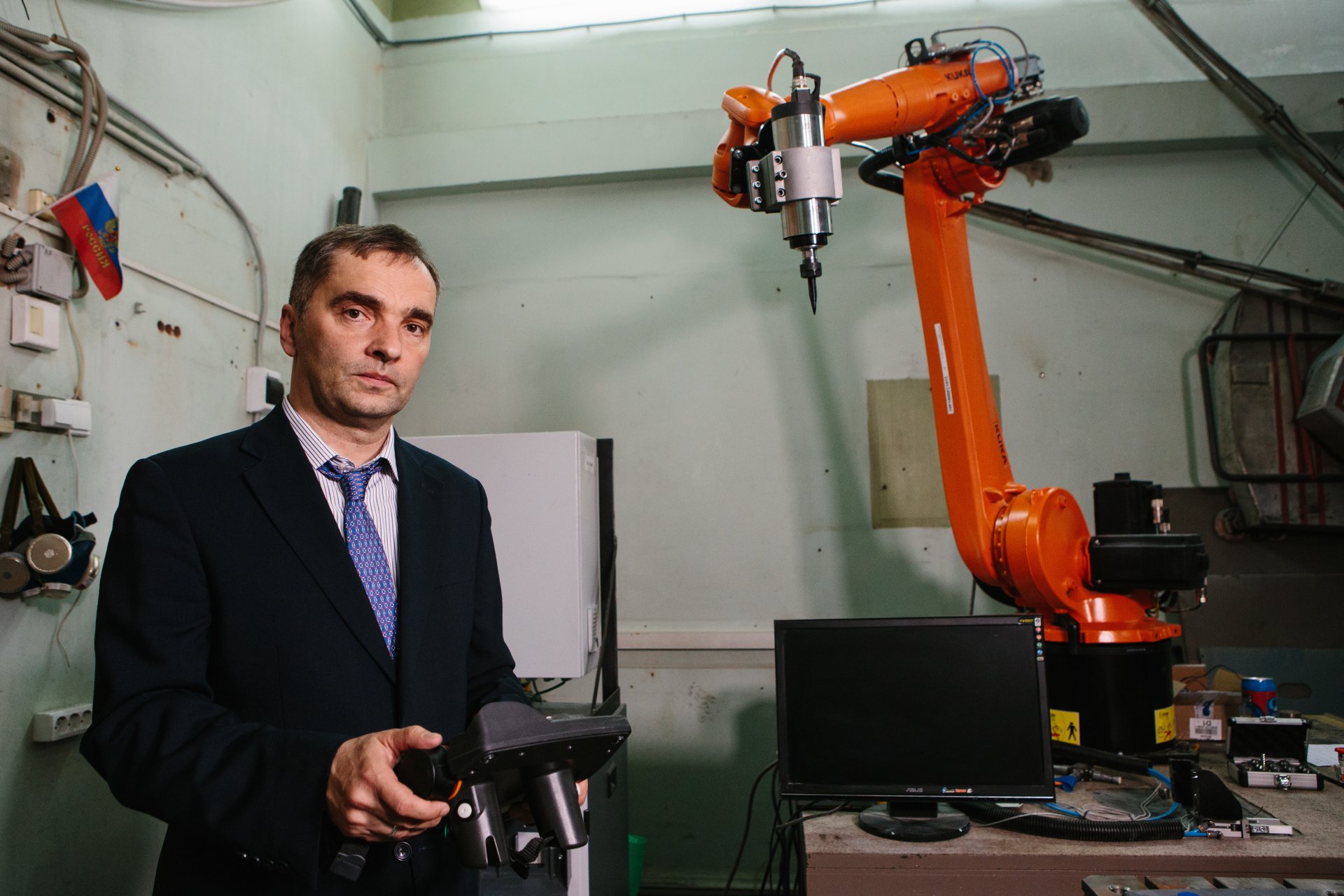
Промышленный робот-манипулятор в Институте проблем механики им. А.Ю. Ишлинского РАН
Фото: Ольга Мерзлякова / «Научная Россия»
― Как на нынешнем этапе выглядит ситуация с роботизацией в России?
― Цифры довольно грустные: на 10 тыс. рабочих в России приходится меньше десяти роботов. Для сравнения: у Южной Кореи, которая сегодня лидирует в области промышленной роботизации, на 10 тыс. рабочих приходится около 1 тыс. роботов. Мы пока далеко в хвосте мировой статистики.
Основная проблема, с которой мы столкнулись в последние годы, ― это санкции. Ключевые производители промышленных роботов ушли с нашего рынка, и тогда выяснилось, что у нас их практически не выпускают. Раньше производство промышленных роботов было развито на «Автовазе» в Тольятти, но после перехода компании в руки Nissan-Renault его ликвидировали.
Остались только отдельные островки производства промышленных роботов, и количество выпускаемых моделей очень маленькое: меньше десяти на всю страну. И производительность их тоже невысока. Для примера: крупные производители представляют большие списки моделей и области их применения: серьезные участники рынка могут предложить 50–60 моделей.
Поэтому сегодня Россия вынуждена искать новые источники промышленных роботов, в первую очередь это китайские образцы. И одновременно нам необходима скоординированная стратегия: важно понять, в каких отраслях, на каких производствах и для каких целей нам нужны роботы. После этого, используя экономические и организационные рычаги, нужно стимулировать их разработку и внедрение на производства.
― Промышленные роботы универсальны? Или для решения конкретных задач определенного завода нужно формировать новый заказ и адаптировать существующие модели?
― Промышленные роботы имеют высокую степень вторичного применения. Например, на роботе в нашей лаборатории сейчас установлено оборудование для механообработки. Но в течение нескольких минут мы можем его переналадить и он начнет выполнять операции укладки или сортировки. Именно в этом преимущество промышленных роботов. Из токарного станка фрезерный не сделать, а робот, хоть и будет немного хуже выполнять узкоспециализированные задачи и уступать тому же токарному станку или покрасочному автомату, но после решения определенной задачи на заводе может быть переоборудован и использован в иных целях.
― В интервью другим изданиям вы не раз высказывали идею о том, что предприятиям, научным институтам и государству нужен общий координирующий орган, который соберет всех за одним столом…
― В 1990-е гг. промышленность распылялась, а отраслевые министерства были ликвидированы. В начале 2000-х гг. мы стали свидетелями обратной концентрации: сформировались Объединенная судостроительная корпорация (ОСК), Объединенная авиационная корпорация (ОАК), госкорпорация «Ростех» и многие другие. Жизнь показала, что такой подход верен и необходима некая координация внутри отрасли. В робототехнике такого координирующего органа пока нет. Была попытка создать его на базе Национального центра развития технологий и базовых элементов робототехники, но эта структура не получила достаточных полномочий.
Сейчас нам нужен условный «Росробот» ― структура, которая определяла бы, какие именно устройства надо разрабатывать, в каком количестве, для решения каких задач. При этом параллельно с промышленной робототехникой у нас развивается мобильная. И мы видим достаточно высокую степень унификации решений, которые применяются и там и там. Чтобы использовать потенциал этой унификации, который значительно удешевит изготовление и внедрение роботов, должна быть структура, которая определит использование, например, конкретных протоколов обмена информацией или датчиков с определенными характеристиками. Это значительно повысит экономическую эффективность применения роботов. Для этого нам и необходим «Росробот».

Фото: Ольга Мерзлякова / «Научная Россия»
― В феврале этого года В.В. Путин подписал обновленную стратегию научно-технологического развития. Позже, в июне он утвердил приоритетные направления научно-технологического развития и перечень важнейших наукоемких технологий. Как эти документы должны повлиять на развитие и внедрение промышленных роботов в России?
― Робототехника фигурирует в приоритетах развития и, более того, учитывалась в Стратегии научно-технологического развития, подписанной в 2016 г. Предполагалась реализация комплексных научно-технических программ (КНТП), которые должны были объединять усилия различных разработчиков, изготовителей и министерств для решения крупных задач. К сожалению, это не сработало и с 2016 г. в условиях бесчисленных согласований получилось запустить только отдельные единичные проекты КНТП. Последние восемь лет были потеряны. Сейчас заложен новый документ, но остается открытым вопрос: как он будет отрабатываться на практике?
― Когда может быть создан промышленный робот исключительно из российских компонентов?
― Сегодня мы не можем изготовить полностью российский конкурентоспособный промышленный робот. Красота робототехники как направления науки заключается в том, что она синергетически объединяет информатику, электронику, сенсорику, электроприводы, материалы и многое другое. Читая лекции на кафедре робототехники МГТУ «Станкин», я всегда говорю: «Робототехник должен разбираться во всем. Настоящий специалист видит все компоненты по отдельности и то, как они работают вместе».
Какие-то компоненты мы сейчас можем производить: например, корпусные детали. Но высокоточные приводы у нас в стране не изготавливают, хотя есть предприятия, которые взялись за решение этой проблемы. Часть датчиков мы производим, но многие придется покупать. В области микроэлектроники также доступно не все. Чтобы сегодня собрать промышленного робота в России, пока придется использовать импортные компоненты, и, чтобы по-настоящему решить проблему импортозамещения, потребуется несколько лет.
Я сформулировал для себя идею, с которой многие могут быть не согласны. Кто-то предлагает сразу переходить на конкурентоспособный уровень производства роботов. В моем понимании надо начать хотя бы с чего-то. Добиваться не сразу сотых миллиметров точности, а для начала точности в 1–2 мм: существует множество операций, где этого будет достаточно. Надо заниматься задачами, которые мы уже сейчас действительно можем решить, и одновременно нацеливаться на будущее.
В этом ключе мы в ИПМех РАН занимаемся интересным направлением научных исследований, которое называем эргономикой рабочего пространства робота. Смотрите: люди пишут на столе определенной высоты и сидят на стульях определенной высоты, это рассчитанные параметры, которые дают наибольшую эффективность. То же самое и с промышленными роботами: не внося изменений в его дорогостоящую механику, мы можем дать рекомендации по конфигурациям манипулятора, которые способны повысить, например, точность в два раза.
― Какими еще разработками занимается Институт проблем механики РАН?
― Лаборатория робототехники Института проблем механики им. А.Ю. Ишлинского РАН существует с 1980-х гг. Одна из наших визитных карточек ― роботы вертикального перемещения. Один из них был разработан для тушения пожаров на крупных топливохранилищах. И в последние несколько лет появились новые направления их применения. Это, например, очистка корпусов кораблей. Когда судно находится в воде, на нем образуется бактериальная пленка, нарастают водоросли и рачки. Все это ухудшает гидродинамику, снижает скорость хода и увеличивает расход топлива. Проблема традиционно решалась постановкой судов в сухие доки, но это дорого, к тому же значительная их часть была приватизирована и утеряна в 1990-е гг. В конце 1980-х гг. суда пробовали очищать с помощью водолазов, но счищаемая взвесь загрязняла воду, а водолазы с грязью счищали и краску. Кроме того, работа водолазов затрудняется в холодных морях, которых у нас немало.
Мы поставили себе цель создать робот, который сможет очищать судно на плаву. Задачу мы решаем совместно с Санкт-Петербургским государственным морским техническим университетом в рамках программы «Приоритет-2030». В лаборатории у нас есть стена, имитирующая корпус судна, и бассейн с водой. Недавно к разработке проявил интерес «Росатом». Надеюсь, скоро будут практические результаты.
Роботов вертикального перемещения также планируется использовать на платформе «Приразломная» в Печерском море. Нефть, которая там добывается, временно складируется в основание платформы ― кессон. Море ― это агрессивная среда, поэтому необходимо раз в год проводить проверку кессона. Сейчас задача решается, но очень дорогостоящим методом. Мы провели расчеты и выполнили научное обоснование, что эту проблему можно решить с помощью роботов вертикального перемещения. Очень приятно, что эту работу выделил президент РАН Г.Я. Красников в качестве основных достижений за 2023 г. на общем собрании членов Российской академии наук.
Весной мы начали работу над мультидисциплинарным грантом Российского научного фонда по теме, связанной с применением беспилотных летательных аппаратов для поиска косяков промысловых рыб. Дело в том, что при промысловой ловле рыбы важно найти косяк: значительная часть статьи расходов рыболовецких судов ― это затраты на топливо. Если судно идет сразу к нужной точке в море, это значительно удешевляет и добычу рыбы, и ее итоговую стоимость для потребителей. В период Советского Союза для этих целей применялась специальная авиация промысловой рыборазведки, но в 1990-е гг. все было приватизировано, самолеты переоборудовали в пассажирские, и теперь такой службы нет вообще. Мы решили применять для этих целей беспилотники, и образовался консорциум в главе с главным научным сотрудником ИПМех РАН А.С. Шамаевым. Наш институт решает задачу поиска косяков рыбы. Морской государственный университет им. адмирала Г.И. Невельского из Владивостока выступает ключевым в области применения беспилотников на судах морского и внутреннего водного транспорта и в проекте занимается вопросами интеграции БПЛА с рыболовецкими судами. А Сахалинский филиал Всероссийского НИИ рыбного хозяйства и океанографии специализируется на научных вопросах промысловой добычи рыбы. Это совершенно новое направление, которое может привести к хорошему практическому результату.
Кроме того, мы занимаемся новыми видами человеко-машинного взаимодействия, в том числе экзоскелетами. Но мы не разрабатываем сами устройства, а учимся ими управлять. Дело в том, что экзоскелетами надо управлять максимально интуитивно, оператор не должен думать, какой рычаг ему надо нажать. Один из подходов ― это миография: на коже человека крепятся датчики, фиксирующие напряжение, которое приходит от мозга к мышцам, расшифровывают его и подают экзоскелету команду на работу. Выяснилось, что эти напряжения разные у всех людей и, более того, меняются у одного человека в течение дня. Поэтому мы занимаемся вопросом адаптации применения миографии к индивидуальным особенностям оператора экзоскелета.
И еще одна тема наших исследований: применение в интересах робототехники идеи академика Б.В. Раушенбаха о преобразовании перспективы изображений. Каждый раз когда трехмерный объект переводится на двухмерное средство воспроизведения изображения (плоский экран), появляются какие-то искажения. Когда робот или беспилотник выполняет задачу, необходимо преобразовывать изображения, полученные с камеры, так, чтобы оператор лучше воспринимал ту или иную информацию. Если робот едет по пересеченной труднопроходимой местности, оператору важно видеть качество поверхности внизу. Если он едет по городу, ему надо лучше воспринимать, что происходит по бокам. Адаптация таких изображений ― довольно интересное новое научное направление.
― Когда заходит разговор о робототехнике, часто появляется образ человекоподобного робота, например образцы Boston Dynamics. Для каких целей разрабатывают антропоморфную робототехнику и насколько это перспективное направление?
― Я не сторонник антропоморфной робототехники и, более того, считаю ошибкой, что в России ранее направляли значительную часть ресурсов на развитие этого направления.
Я часто привожу пример: автомобиль ― это не механизированная лошадь, у него совершенно другой принцип движения. То есть когда люди пересаживались с лошадей на машины, они использовали колеса, а не разрабатывали механические копыта. Может, кто-то и пытался это создать, но разработка была неэффективной. То же самое с антропоморфной робототехникой: 50 степеней подвижности и их взаимодействие ― это красивые задачи для ученых, но неэффективное решение с точки зрения практического применения. Мое личное мнение ― это красивая дорогая игрушка. В качестве примера можно вспомнить робота, который летал на МКС. С тех пор он находится в музее, а направление так и не получило развития.
Есть другие, более эффективные, дешевые решения, которые к тому же проще обслуживать.
― Насколько реально выполнить поставленную задачу об увеличении количества промышленных роботов на 100 тыс. до 2023 г.?
― Сейчас запускается национальный проект, основной лозунг которого — «Производство средств производства». Это преимущественно развитие станкостроительной промышленности, куда попали и промышленные роботы. Если подойти к решению задачи с умом, правильно поставленными задачами и организационными решениями, у нас все получится. Будем надеяться на лучшее.















































{kind=link}