

В рамках научно-технического фестиваля РОБОФЕСТ студенты Донского государственного технического университета представили собственную разработку – робота-манипулятора, который производит погрузку багажа на борт самолета без механических повреждений. Среди 5 тысяч участников из 4 стран мира и 65 регионов России студенты ДГТУ стали лучшими в номинации «Аэропорты – Инженерный проект».
О реализации разработки и дальнейших перспективах технического проекта рассказал «Научной России» Михаил Кувшинов, автор концепта робота-манипулятора, студент 2 курса факультета «Технология машиностроения» Донского государственного технического университета. «Мы начали работать над проектом в ноябре прошлого года. Иногда нам приходилось выполнять всё дистанционно без доступа к университетским лабораториям. Но несмотря на все трудности, времени на создание и доработку прототипа стало больше. Это позволило усовершенствовать нашу систему к началу РОБОФЕСТа и показать лучшие результаты в соревновании «Инженерный проект» – направление «Аэропорты», – рассказал автор проекта.

Михаил Кувшинов. Студент 2 курса ДГТУ
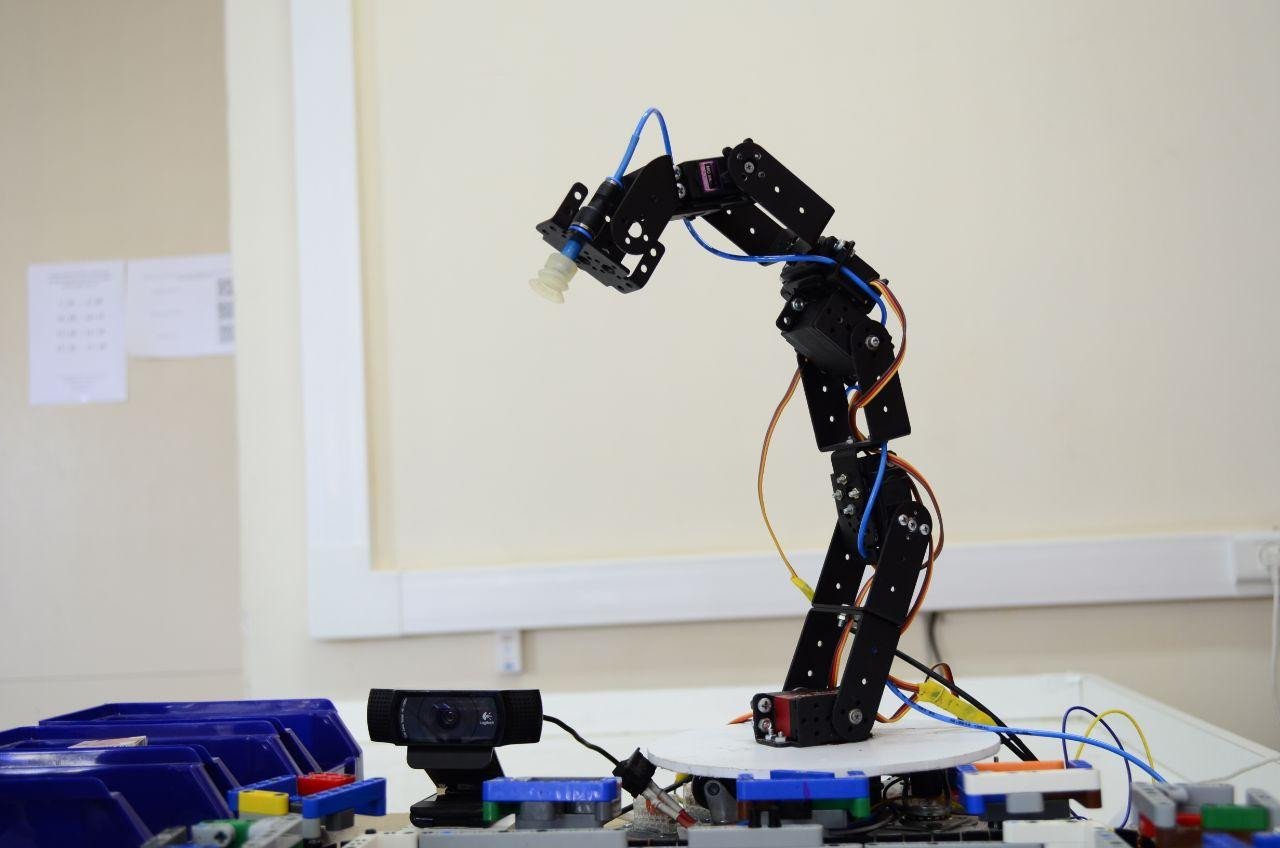
Система перемещения багажа состоит из нескольких основных частей: конвейера, системы сканирования, зоны погрузки и манипулятора. Багаж со штрих-кодом попадает на конвейер, где проходит через систему сканирования. Данные поступают в контроллер, который управляет манипулятором. На основе полученных данных он решает, в какой контейнер погрузить багаж. В ходе процесса погрузки учитываются габариты багажа, его классификация/маркировка (например, хрупкий груз будет помещен в специально предназначенный для этого контейнер). После сканирования робот-манипулятор захватывает багаж с движущегося конвейера и переносит его в определенный контейнер, который грузится на борт самолета. При захвате используется вакуумная система – так безопаснее, багаж переносится с конвейера в зону погрузки без механических повреждений.
«Мы изучали существующий рынок в ходе предварительного исследования (это тоже было частью задания на РОБОФЕСТе) и выяснили, что в мире существует только одна аналогичная система. Она действует в аэропортах Монреаля, Лос-Анжелеса и Токио. Их система работает по принципу механического захвата, и поэтому иногда повреждает багаж. Мы же захотели не просто автоматизировать этот процесс в России, но и создать что-то новое, более эффективное. Так мы пришли к идее использования вакуумной системы для захвата багажа. Она состоит из секций присосок, соединённых трубками с вакуумным насосом. Благодаря вакуумной системе багаж больше не будет падать с конвейера и в целости и сохранности, без каких-то механических повреждений будет погружаться на борт», – добавил Михаил Кувшинов.
Научно-техническая разработка заинтересовала представителей Краснодарского аэропорта, которые находились на фестивале. В настоящее время ведется обсуждение об автоматизации процесса погрузки багажа в Краснодарском аэропорту.
Фото предоставлены Михаилом Кувшиновым и пресс-службой ДГТУ





























{kind=link}