

Роботизация способна значительно увеличить эффективность промышленности и сельского хозяйства. Пока эти технологии в большей степени находятся на стадии прототипов, а ученые и инженеры предлагают новые решения в области и аппаратной части, и программной.
Сотрудник Финансового университета при Правительстве РФ Никита Андреевич Андриянов стал лауреатом премии правительства Москвы молодым ученым за работы, связанные с развитием машинного зрения. Разработки можно использовать в связке с манипуляторами и таким образом автоматизировать, например, сбор яблок в садах. В интервью мы обсудили, почему роботы до сих пор массово не используются в агрикультуре, нужно ли перестраивать существующие хозяйства, чтобы машины могли работать там, и как быстро способны окупиться автоматизированные системы после их установки.
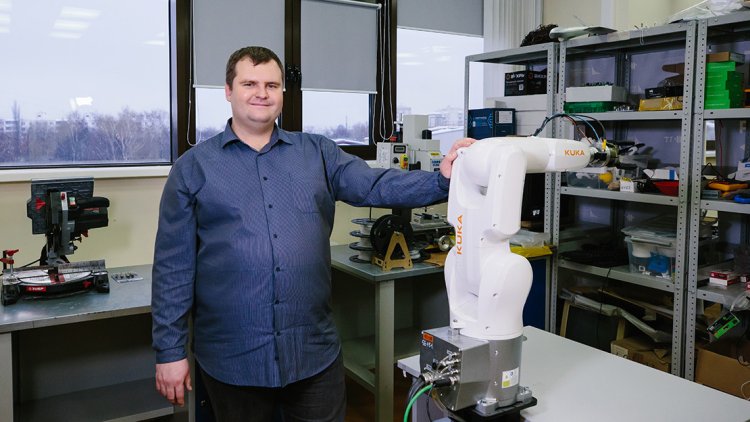
Никита Андреевич Андриянов
Фото: Ольга Мерзлякова / Научная Россия
Никита Андреевич Андриянов ― кандидат технических наук, ведущий научный сотрудник Института цифровых технологий Факультета информационных технологий и анализа больших данных Финансового университета при Правительстве РФ, заведующий молодежной лабораторией компьютерного зрения. Окончил Ульяновский государственный технический университет в 2013 г. Дважды лауреат премии ректора Финансового университета за вклад в развитие научно-исследовательской деятельности, лауреат премии Правительства Москвы молодым ученым 2025 г.
― Работа, за которую вы получили премию правительства Москвы, посвящена повышению эффективности сельского хозяйства путем применения систем глубокого машинного обучения. Вы работаете в Финансовом университете, но занимаетесь искусственным интеллектом в области агропромышленного комплекса. Казалось бы, исследования не связаны с тематикой вуза…
― Я часто сталкиваюсь с этим вопросом на конференциях. В Финансовом университете существует IT-факультет, на базе которого в 2020 г. открыли инжиниринговый центр. Руководитель департамента исходил из того, что технологии уже достаточно развиты в финансовом секторе — например, там давно используются системы машинного обучения для кредитного скоринга. Внедрять что-то новое в этой сфере было гораздо сложнее.
При этом перед нами открывалось огромное поле для экспериментов и автоматизации — сельское хозяйство, которое оставалось одной из самых неохваченных современными информационными технологиями отраслей. Именно так и появилось первое направление. Тогда мы хотели создать собственную систему с нуля до готового продукта, включая как аппаратную часть, так и интеллектуальную составляющую. Мы открыли инжиниринговый центр, собрали команду механиков и специалистов по компьютерному зрению и начали работать над роботом. В то же время был интерес и со стороны некоторых садоводческих хозяйств. Это поддерживало нас в понимании того, что разработка действительно нужна реальному сектору экономики.
― О внедрении систем с ИИ в сельское хозяйство говорят много, но, на мой взгляд, это направление пока остается достаточно консервативным, массового применения подобных технологий нет. Почему?
― Складывается впечатление, что сейчас наука действительно несколько опережает практическое использование разработок.
Одна из причин, как ни странно, связана с позицией самих фермеров и садоводческих хозяйств. Они достаточно консервативны и считают, что проще нанять людей. Работа по старинке выглядит надежнее: вложить крупную сумму в робота рискованно, ведь непонятно, как он справится и окупится ли.
С другой стороны, массовое внедрение интеллектуальных роботов затрудняет необходимость их сервисного обслуживания. Это аппаратный продукт, который должен работать в разных погодных условиях, в том числе в дождь, и на неподготовленных территориях с кочками и ямами. Если что-то сломается, фермер вряд ли сможет починить робота самостоятельно. Компании-производителю придется отправлять сотрудника в отдаленное хозяйство, чтобы тот заменил, условно, один винтик. Такое обслуживание может быть невыгодным для самой компании. Пока мы находимся на этом этапе.

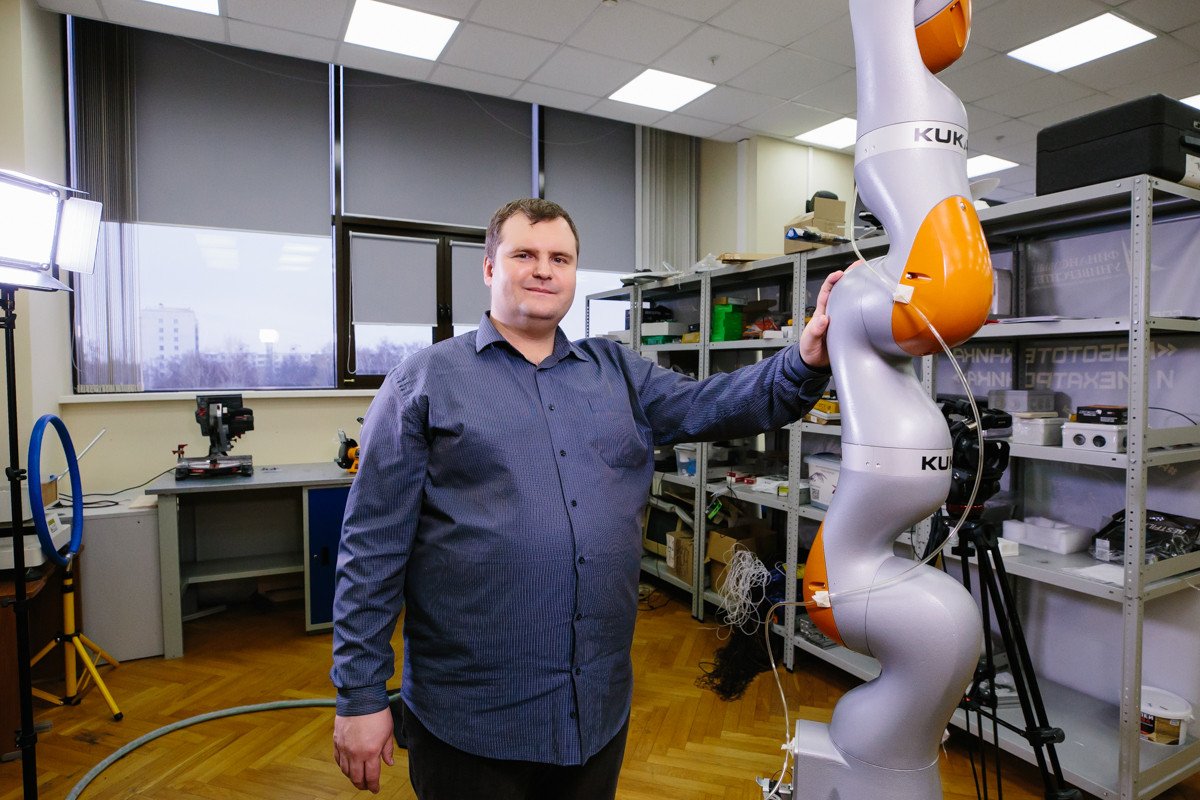
Фото: Ольга Мерзлякова / Научная Россия
― То есть в России пока нет компаний, готовых создать такие системы для сельского хозяйства под ключ?
― Насколько мне известно, таких компаний нет, но мы сотрудничаем с Федеральным научным агроинженерным центром ВИМ. Это одна из самых известных организаций в области механизации сельского хозяйства в стране, давно занимающаяся аппаратной частью.
Мы совместно внедряли, например, наше решение — робота с компьютерным зрением для сбора яблок. Он использовался в реальных хозяйствах, в том числе в «Зоринских садах», и действительно приносил пользу. Помимо сбора яблок, такие роботы могут прогнозировать урожай: оценивать количество завязей еще на стадии цветения. То есть диапазон применения достаточно широк, но пока системы остаются на этапе единичных прототипов.
― Вы занимаетесь программной частью и работаете в связке со специалистами, создающими «железо». Можете оценить, насколько одно из направлений опережает другое? Возможно, есть системы, к которым пока не готовы роботы, или, наоборот, уступает интеллектуальная часть?
― Думаю, что цифровая часть все же немного идет впереди: в симуляторах решить задачу проще, чем на практике. Например, в области обучения с подкреплением: в компьютерной среде роботов учат, скажем, собирать кубик Рубика. Однако потом возникает отдельная серьезная задача — перенести эти навыки на реальное устройство. На практике многое оказывается несовершенным: например, угол поворота манипулятора будет не таким, как в симуляции. Но мы стараемся учитывать эти моменты и все равно стремимся сообща создать целостный работающий продукт.
Помню, как мы мучились с калибровкой при создании одного из роботов: камеры на нем должны быть жестко зафиксированы. Но когда робот едет по неровной поверхности и наезжает на кочку, меняется угол наклона — и вся система обнаружения объектов просто перестает работать.
― Насколько тогда сами хозяйства ― коровники, свинарники, сады, поля ― готовы к внедрению таких технологий? Надо ли создавать новую инфраструктуру и условия, в которых роботы смогут работать, или возможно адаптировать существующую?
― Про всю Россию сказать не могу, но знаю, что сейчас становятся популярными так называемые интенсивные сады. Мы тестировали наше оборудование именно в таких условиях: там достаточно невысокие деревья, плотная посадка в рядах и одинаковые расстояния. Такие сады уже более или менее готовы к внедрению подобных систем, по крайней мере на уровне прототипа.
Однако существует еще много садоводческих хозяйств, где таких условий нет: там использовать роботов будет сложнее. Потребуются, например, более высокие платформы, если яблони уже выросли.

На базе квадроцикла специалисты создали мобильную беспилотную платформу ― образец дистанционно управляемого транспорта. Камеры глубины не только фиксируют цветное изображение, но и создают карту расстояний до объектов. В результате оператор может дистанционно управлять платформой и одновременно получать информацию о расстоянии до препятствий. Проект показал, как при сочетании серийной техники и доступных вычислительных модулей можно быстро разрабатывать прототипы интеллектуального транспорта для исследований и задач мониторинга. Создатели планировали использовать такие платформы для передвижения робота-манипулятора для сбора яблок, однако вес манипулятора превзошел возможности квадроцикла
Фото: Ольга Мерзлякова / Научная Россия
― Ваши работы непосредственно связаны с машинным зрением. Какие нерешенные задачи остаются в этом направлении? Надо научить машину отличать яблоко от груши, а рожь от пшеницы, или проблемы сложнее?
― Если говорить о компьютерном зрении и глубоком обучении, то такие модели обычно строятся на большом количестве данных. Я всегда привожу студентам пример: показали системе миллион картинок с кошками и миллион с собаками — и она учится их различать. Поэтому отличать яблоко от груши уже возможно.
Задача усложняется тем, что мы должны не просто распознать яблоко, а точно оценить его координаты и местоположение. А в реальных условиях все сложнее: нужно собирать огромные объемы данных, учитывая солнечные блики, туман, перекрытия плодов листьями или друг другом. Особая проблема — зеленые яблоки на фоне листвы. Или, бывает, прилетает птичка — и система начинает распознавать ее как яблоко, а яблоко как птичку. Подобные случаи у нас тоже были. Это одна из основных трудностей.
― На каком этапе сейчас находятся эти работы? На что в данный момент способны такие системы?
― На высокой стадии готовности, и уже используются системы, которые распознают яблоки и оценивают их координаты. На датасетах, собранных для конкретных садоводств, мы добиваемся точности 95% и выше. Это хороший показатель.
Другие проекты пока на более ранних стадиях — например, задачи для группового управления, когда работает не один, а целый рой или коллаборация роботов для сбора яблок. Задача в том, чтобы машины не только находили яблоки, но и оценивали свое местоположение: в каком ряду находятся, с какой стороны зашли, куда должны ехать. При этом они обмениваются информацией: например, первый робот работает в восьмом ряду, второй — в девятом, и второй передает данные первому, чтобы тот не заезжал в девятый, а направился сразу в десятый ряд.
― Ранее я общался со специалистом в смежной теме, занимающимся созданием систем машинного зрения не для садов, а для животноводческих хозяйств. Как одну из проблем он выделил сложность дистанционного определения болезней животных: одно дело — осмотреть вживую, другое ― с экрана. А что касается болезней растений, существуют ли проекты, предназначенные для их автоматического выявления?
― Мы со студентами подавали подобный проект в программу «Умник» Фонда содействия инновациям. Идея заключалась в создании мобильного приложения: фотографируешь лист или плод, а оно определяет, есть ли заболевание, и передает из базы данных совет, что делать с зараженным растением.
Но здесь мы снова упираемся в проблему данных. Есть открытые датасеты, в которых представлены типовые заболевания, например гниль. Они хорошо распознаются и классифицируются. Однако чтобы собрать обширную библиотеку и научиться распознавать большое количество разных болезней, нужно создавать собственные базы с дополнительной информацией. Поэтому мы пока умеем классифицировать основные типы, но далеко не все заболевания, особенно редкие.
Помимо того что нужно собрать данные о болезнях, необходимо, чтобы человек их различал и правильно размечал ― обучал систему. Чтобы отличить яблоко от груши, не требуется быть экспертом. Но когда речь идет о заболеваниях, определении сортов или о других специализированных знаниях, нужен человек, который разбирается в этом профессионально.
Мне кажется, проще обучить такого эксперта инструментам разметки, чем пытаться передать глубокие агрономические знания специалисту по разметке данных. Если говорить о простой классификации уровня «кошка ― собака», то обучить навыкам разметки можно за пару часов. Если задачи сложнее (необходимо выделять объекты и их части или даже соотносить отдельные пиксели с объектами), потребуется несколько мастер-классов. Но это все еще быстрее, чем дополнительно учить специалиста в области машинного зрения и ИИ на агронома.
― Относительно недавно компьютеры могли себе позволить только крупные институты и корпорации, а сегодня компьютер есть практически у каждого. Системы, о которых мы говорим, пока выглядят достаточно дорогими и труднодоступными. Можно ли прогнозировать, когда их начнут широко использовать в сельском хозяйстве, и возможна ли подобная система, условно, в СНТ на шести сотках?
― Если учитывать, как быстро сегодня развивается отрасль, трудно сказать, что будет уже через пять лет. Но массовое внедрение таких систем возможно ― в этом я уверен.
Что для этого нужно? Как бы это странно ни звучало, важными факторами могут стать появление больших языковых моделей и массовое применение вайб-кодинга (метод программирования, при котором код генерируется нейросетями. ― Примеч. авт.). Будет проще осваивать даже самые сложные программы, связанные с такими системами, садоводы начнут быстрее разбираться в них и даже самостоятельно их модифицировать.
Сложно оценивать сроки внедрения технологий наверняка, но, думаю, при нашей жизни это должно произойти.
― Существуют ли оценки экономической эффективности внедрения таких систем? Вкладываясь в развитие, необходимо понимать, когда оно окупится…
― Нас часто спрашивают об экономической составляющей нашей работы. Здесь есть позитивный момент: вычислительные мощности развиваются, и оборудование постепенно дешевеет. Возможно, тот робот, которого мы начинали делать в 2020 г., сейчас обошелся бы значительно дешевле.
Пару лет назад мы считали, что для окупаемости нужно порядка четырех-пяти лет с учетом замены ручного труда и потенциально большего объема собранного урожая. Точных цифр у меня нет, но в идеальном случае, когда ничего не ломается и не требует замены, срок окупаемости может быть не таким большим. У нас как раз есть блок, отвечающий за финансы и экономику, который занимается этими расчетами.
Интервью проведено при поддержке Министерства науки и высшего образования РФ
































{kind=link}