

Электропривод – это система, служащая для привода в движение функциональных элементов машин и агрегатов для выполнения определенного технологического процесса. Более мощные и надежные приводы представляют интерес для самых разных отраслей промышленности, особенно авиа- и машиностроения. Ученые Пермского Политеха разработали конструкцию привода, которая будет проще и дешевле в производстве и гораздо функциональнее в применении. Их изобретение способствует укреплению технологического суверенитета России.
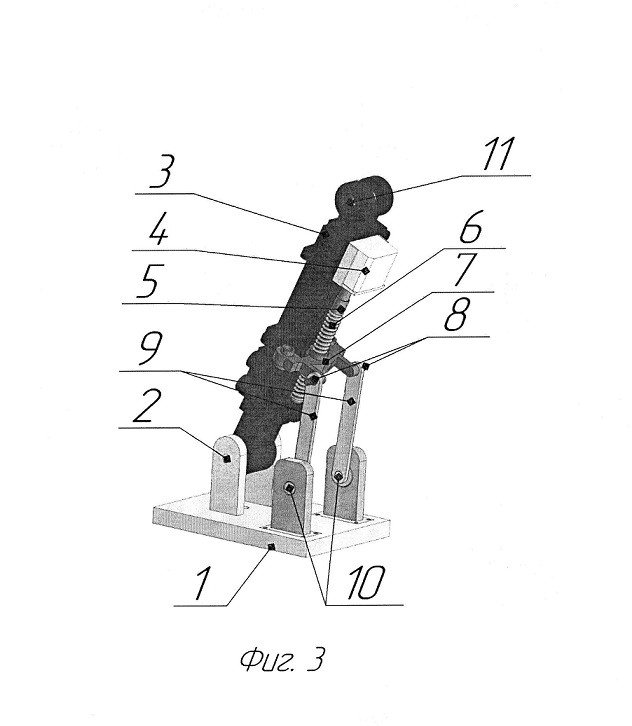
Чертеж конструкции привода в изометрии
Разработка ученых защищена патентом РФ № 2 766 637 F16H 25/20. Идею новой конструкции механизма предложил студент аэрокосмического факультета ПНИПУ Евгений Тонков.
— Предлагаемая нами конструкция привода манипулятора проще, динамичнее, надежнее, чем у электромеханического привода поступательного действия. Благодаря своей уникальной конструкции такой привод манипулятора имеет возможность перемещать в пространстве объекты большой массы, так как нагрузка равномерно распределяется на винт, шарнирные элементы и силовые тяги. Наша разработка также обеспечивает высокую точность перемещения несущего основания, что позволяет использовать ее в широком диапазоне отраслей промышленности, — рассказывает доцент кафедры механики композиционных материалов и конструкций ПНИПУ, кандидат технических наук Елена Поезжаева.
Разработчики упростили конструкцию привода манипулятора, расположив электродвигатель прямо на несущем основании. Посредством муфты он соединяется с винтом, образуя входное звено. В качестве выходного звена используется гайка с силовыми тягами, что увеличивает грузоподъемность механизма. Для равномерного распределения нагрузки по всей конструкции привода манипулятора используются шарнирные соединения основных конструктивных элементов. При этом фундаментная площадка может вращаться вокруг своей оси, а несущее основание выполнено таким образом, чтобы была возможность присоединить к нему последующие дополнительные несущие основания.
Предложенная конструкция привода манипулятора обладает большей грузоподъемностью, чем ее предшественники, и позволяет с высокой точностью перемещать в пространстве более тяжелые объекты. Ее можно применять при сборке тяжелых агрегатов или при погрузке тяжестей на предприятиях.
Источник информации и фото: пресс-служба Пермского Политеха























{kind=link}