

Несмотря на невысокую скорость движения, речной транспорт по-прежнему используется для внутренних перевозок различных технических грузов: песка, угля, нефти, зерна и даже грузовых автомобилей. В основном с этой целью используются толкаемые буксиром баржи с механическим управлением. Для повышения рентабельности грузоперевозок команда исследователей из Пермского Политеха и Пермского филиала Волжского государственного университета водного транспорта предложила вариант автоматизации управления буксиром-толкачом. Исследование выполнено в соответствии с целями программы академического стратегического лидерства «Приоритет 2030».
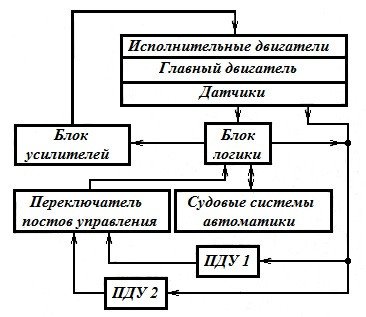
Общая структура системы управления
Статья опубликована в сборнике по итогам международной научно-технической конференции «Инженерная наука: проблемы, идеи, перспективы (Engineer-2022)».
— На широко используемых в России речных толкачах установлена механическая система управления. Она устроена так, что работа главных двигателей контролируется за счет тросикового управления и визуального наблюдения. Это значит, что работа двигателя постоянно контролируется оператором посредствам тросов и рычагов. Такие системы обладают малой прочностью, требуют регулярных проверок и просто морально устарели. Именно поэтому имеет смысл заменить устаревшую механическую систему управления толкачом на современную электрическую, — рассказывает руководитель исследования, доцент кафедры «Информационные технологии и автоматизированные системы», кандидат технических наук Андрей Погудин.
Согласно предложенной разработчиками схеме, автоматизированная система дистанционного управления судном должна включать две панели. Первая панель, расположенная в машинном отделении, отвечает за дистанционный контроль рабочих характеристик и состояния приборов на судне. В целях обеспечения безопасности она должна предусматривать возможность подачи абсолютно всех команд. Вторая панель размещается в управляющей рубке. Она рассчитана на контроль только ключевых элементов и приборов, характеризующих режим движения корабля, например, частоту вращения гребного вала.
Такая система позволила бы дистанционно автоматически управлять основными дизельными двигателями корабля с мостика и регулировать работу главного двигателя с помощью машинного телеграфа без вмешательства в процесс оператора. Реализовать этот проект можно на основе систем дистанционного управления, уже используемых на более сложных судах, например «Зульцер», «Фиат», «Пилстик».
Информация и фото предоставлены пресс-службой Пермского Политеха
























{kind=link}