

Денис Опарин
Около 12% людей в мире имеют повреждения конечностей, которые осложняют социальную жизнь и профессиональную деятельность. Ежегодно примерно 390 тыс. становятся инвалидами по причине потери рук. Для решения этой проблемы используют протезы. Наиболее современные из них, бионические, работают на электрическом приводе. Ученые Пермского Политеха спроектировали линейный цилиндрический двигатель для бионического протеза кисти. Он будет имитировать естественное сокращение мышц пальцев. Конструкция позволит повысить механическую надежность, ремонтопригодность и скорость работы протеза. Разработка не имеет аналогов в мире, ее можно использовать в отечественных бионических протезах. Исследование выполнено в рамках Программы стратегического академического лидерства «Приоритет 2030».
Результаты исследования разработчики представили в журнале «Вестник ПНИПУ. Электротехника, информационные технологии, системы управления» (2022). Работа выполнена по государственному заданию Министерства науки и высшего образования РФ. В разработке также приняли участие специалисты компании ООО «Зеленый мир» (Пермь).
– Сейчас чаще применяют протезы с двигателями вращения, которые используют механическую передачу для управления движением конечностей. Но наиболее эффективны и надежны системы с естественным движением. Они максимально близки к управлению конечностью человека. Линейные электрические двигатели имеют такой же тип движения, как и мышцы, и позволят сделать движение протезов наиболее естественным. К их недостаткам можно отнести невысокую мощность и крупный размер, из-за которого их пока не устанавливали в автономные протезы, – рассказывает старший преподаватель кафедры «Электротехника и электромеханика» Пермского Политеха Денис Опарин.
Ученые предложили заменить двигатели вращения в протезах на линейные, чтобы уменьшить их механическую сложность и повысить ремонтопригодность. Для этого они спроектировали линейный двигатель небольшого размера, обеспечивающий высокую точность позиционирования. В качестве элемента питания используется малогабаритный источник постоянного тока, который находится в корпусе протеза. Расчет исследователи выполнили в среде Mathcad. Они разработали 3D-модели двигателя, его компонентов и их расположения в корпусе протеза. Диаметр индуктора двигателя составил 25 мм, а его длина – 81 мм. Он сможет развивать силу в 14,7 Н при токе 0,47 А. Разработку можно использовать в протезах кисти или предплечья.
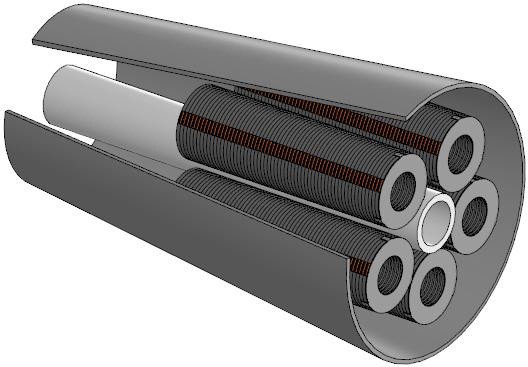
Схематичная 3D-модель, показывающая расположение двигателей в гильзе протеза
Разработка позволит предварительно оценить расположение двигателей в протезе, чтобы улучшить эффективность его работы. Линейный двигатель можно использовать для создания модульных конструкций с быстросъемными элементами, в приводах экзоскелетных систем и в протезах цельных конечностей.
– Мы предложили компоновку протеза кисти и предплечья, которая позволит использовать линейные двигатели и тяги по типу сухожилий. Благодаря этому движение протеза станет более быстрым, естественным и энергоэффективным. Это поможет сэкономить запас «заряда» для автономной работы устройства, – поясняет исследователь.
Помимо использования в протезах, линейные двигатели также можно применять при автоматизации теплиц, в шлифовальных станках, приводах станков с числовым программным управлением, в манипуляторах, а также в нефтяной, газовой и авиационной промышленности.
В дальнейших планах ученых – разработка системы управления двигателем. В частности, в нее войдет аппаратное обеспечение, которое будет управлять двигателем, плавно имитируя естественные движения мышц. Его можно будет внедрить в системы управления отечественных протезов.
Источник информации и фото: пресс-служба Пермского Политеха























{kind=link}