

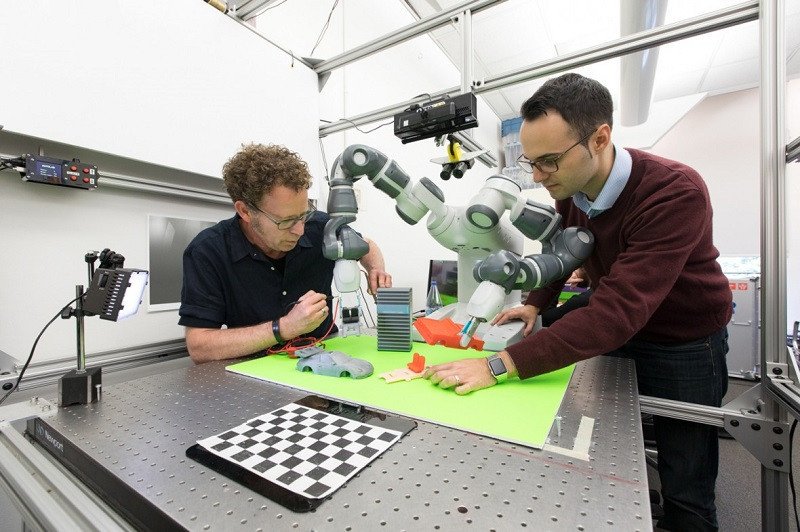
Кен Гольдберг (Ken Goldberg), профессор Университета Калифорнии в Беркли, научный сотрудник Джефф Малер (Jeff Mahler) и Лаборатория науки и техники автоматизации (AUTOLAB) создали робота под названием DexNet 2.0. Этот робот настолько успешно берет предметы в свою «руку», что эта технология вскоре может быть применена в промышленности с возможностью революционизировать производство и цепочку поставок. О своей разработке исследователи рассказали в статье, опубликованной в журнале MIT Technology Review.
Захват предметов необычной формы, которые люди берут в руки в повседневной жизни — трудная задача для роботов. Объекты неправильной формы, например обувь, бутылки, открытые ящики, даже резиновые утята, люди берут и подбирают с легкостью, но роботам непросто разобраться, как за них взяться. Значительный шаг к преодолению этой проблемы сделали специалисты по робототехнике — они создали робота, который способен поднимать и перемещать незнакомые объекты реального мира с 99-процентным коэффициентом успеха.
DexNet 2.0 достиг столь высокой точности и ловкости благодаря процессу, называемому глубоким обучением. Исследователи построили обширную базу данных трехмерных форм — всего 6,7 миллиона точек данных — которую нейронная сеть использует для изучения захватов, которые позволят подбирать и перемещать объекты нерегулярных форм. Нейронная сеть затем была подключена к 3D-датчику и роботизированной руке. Когда объект оказывается перед DexNet 2.0, он быстро изучает его форму и выбирает захват, позволяющий успешно поднимать и перемещать объект в 99 процентов случаев. DexNet 2.0 также в три раза быстрее, чем его предыдущая версия.























{kind=link}