

Российские ученые предложили новый метод управления сложными системами — от группы роботов до объектов тяжелой промышленности. Подход позволяет не учитывать все объекты и их взаимодействия, что экономит не только время, но и материальные ресурсы. При этом нужно минимальное число измерений и исполнительных устройств. Исследование проведено в Институте проблем машиноведения РАН при поддержке гранта Российского научного фонда (РНФ) № 18-79-10104 и опубликовано в Journal of the Franklin Institute.
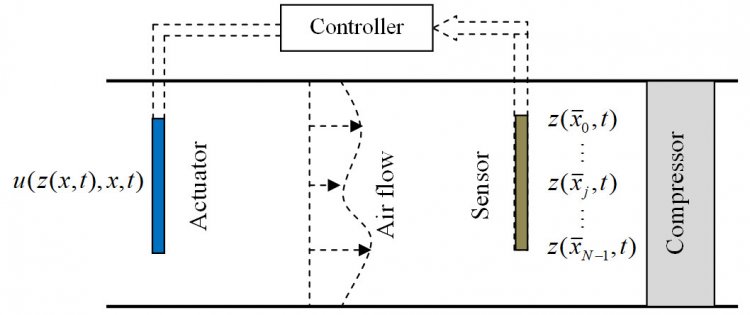
Существующая система управления осевым компрессором с распределенным исполнительным механизмом (Actuator) и распределенным сенсором (Sensor). Источник: Игорь Фуртат
В современном мире задачи управления становятся повсеместными и актуальными. Среди них — управление группой беспилотных аппаратов или роботов, молекулами и атомами в кристаллических решетках, электроэнергетическими сетями и прочим. Каждый объект в такой системе называют подсистемой, или агентом. Когда их достаточно много, приходится сталкиваться с определенными сложностями — при обмене данными между несколькими десятками и сотнями датчиков информация может доходить с задержками и ошибками, что будет тормозить весь процесс. Обычно в таком случае математики переходят от сетевых к распределительным моделям, которые описывают поведение бесконечного числа взаимодействующих подсистем. Эти модели часто встречаются в нефтегазодобывающей и химической промышленности, однако их использование требует огромных ресурсов — энергетических и материальных.
«Интуитивно складывается впечатление, что чем больше подсистем, тем больше требуется измерительных и управляющих устройств. А что, если измерять не каждое состояние агента в сети и не каждым агентом управлять? В этом случае необходимо выработать такой алгоритм, который будет учитывать взаимодействие между остальными подсистемами, состояние которых не измеряется и на которые не оказывается управляющее воздействие», — рассказал руководитель проекта по гранту РНФ Игорь Фуртат, доктор технических наук, заведующий лабораторией в ИПМаш РАН.
Ученые из Института проблем машиноведения Российской академии наук (Санкт-Петербург) предложили новый метод нелинейного управления распределенными системами. В его основе лежит сложный математический аппарат с дифференциальными уравнениями. Он универсален для систем разных типов, и при этом можно обойтись минимальным числом измерений и конечным числом устройств. Так, на нефтеперерабатывающем заводе находится свыше сотни различных датчиков и приборов, которые дополняют данные друг друга, а благодаря подходу авторов можно уменьшить количество сенсоров и ускорить процесс работы общей системы.
В качестве демонстрационного примера можно рассмотреть задачу управления осевым компрессором, широко распространенным в промышленности. Традиционно предлагается использовать один исполнительный механизм большой мощности и дорогостоящий датчик для распределенных измерений. В статье показано, что производительность компрессора можно сохранить за счет использования минимального числа маломощных исполнительных механизмов для нагнетания воздуха и минимального числа дешевых сенсоров. Это позволяет не только уменьшить стоимость компрессора, но и повысить его надежность за счет повторяющихся устройств, а также снизить потребляемую мощность за счет использования нового нелинейного закона управления.
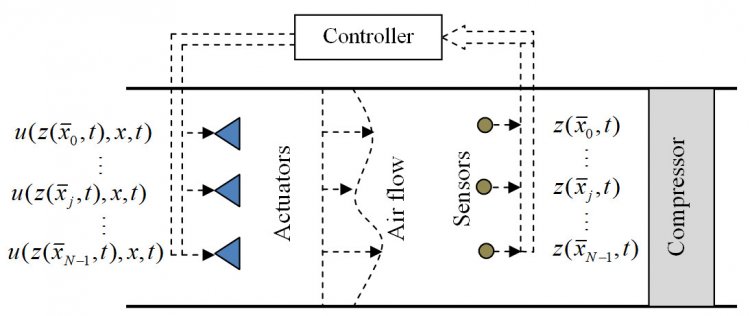
Предложенная система управления осевым компрессором с минимальным числом маломощных исполнительных механизмов (Actuators) и минимальным числом дешевых сенсоров (Sensors). Источник: Игорь Фуртат
Необходимого качества системы регулирования можно добиться, управляя не каждой подсистемой, а лишь отдельными, и учитывая их взаимодействие с остальными. При этом получены условия расчета, показывающие, какое количество сенсоров и исполнительных механизмов необходимо. Также авторы рассчитали, какие параметры позволят обеспечить наименьшие затраты.
«Наша работа наглядно демонстрирует, что при управлении большой системой не обязательно учитывать вклад каждого устройства. Значит, в некоторых случаях можно сэкономить на реальном оборудовании, и наши результаты моделирования это подтвердили. Мы надеемся, что описанный подход позволит создать экологичную промышленность и пересмотреть зачастую избыточные требования к производственным объектам», — отметил Игорь Фуртат.
Информация и фото предоставлены пресс-службой Российского научного фонда























{kind=link}