


Бионические протезы, системы для реабилитации больных с нарушениями двигательной активности и роботизированные устройства, повторяющие движения за оператором, — технологии, широко востребованные в современном мире. Развить перечисленные направления позволил комплексный подход к картированию нейромышечной активности человека, созданный исследователями Московского государственного технического университета им. Н.Э. Баумана. В 2024 г. эта технология была удостоена премии Правительства Москвы молодым ученым. Какие новые возможности дают в медицине и робототехнике устройства, чья работа основана на многоплановой регистрации активности мышц? С какими проблемами сталкиваются разработчики бионических протезов? Можно ли адаптировать инновацию МГТУ для управления экзоскелетами? Какие еще технологии для медицинской диагностики и реабилитации создаются в университете? Об этом и многом другом корреспонденту портала «Научная Россия» рассказал лауреат премии Правительства Москвы молодым ученым, доцент кафедры «Медико-технические информационные технологии» МГТУ им. Н.Э. Баумана, кандидат технических наук Андрей Николаевич Брико.
Андрей Николаевич Брико — кандидат технических наук, доцент кафедры «Медико-технические информационные технологии» факультета «Биомедицинская техника» Московского государственного технического университета им. Н.Э. Баумана. Вместе с ассистентом кафедры Владиславой Вячеславовной Каправчук был удостоен премии Правительства Москвы молодым ученым за 2024 г. в номинации «Фармацевтика, медицинское оборудование и материалы» за разработку технологий картирования нейромышечной активности для реабилитационных медицинских устройств и антропоморфных бионических систем.
— Расскажите, пожалуйста, о ходе ваших исследований и уже полученных результатах.
— Хотелось бы начать с того, что эта тема уже давно стала одним из ключевых направлений нашей кафедры. Исследования в этой области развиваются у нас около десяти лет, и я участвовал в них, еще будучи студентом. Когда на пятом курсе началась специализация, я выбрал как раз это направление. В то время коллектив кафедры участвовал в совместном проекте с Ракетно-космической корпорацией «Энергия», где велась работа над созданием отечественного протеза кисти. Наша задача заключалась в разработке системы управления, которая сокращала бы время реабилитации и делала процесс управления более удобным и интуитивным. Тогда и началась моя работа в университете в должности техника. Позже я поступил в аспирантуру, стал преподавателем кафедры и продолжил исследования по этой тематике.
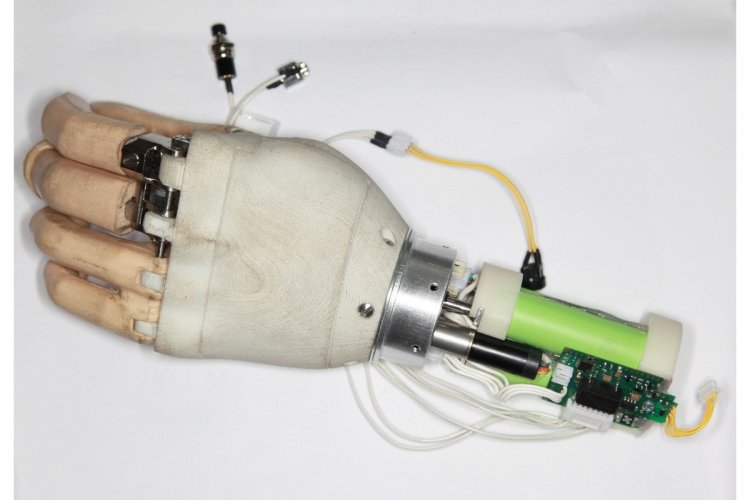
Протез кисти с электромеханическим управлением (ПАО «РКК „Энергия“ имени С. П. Королева»).
Фото: А.Н. Брико
Наши исследования в обсуждаемой области начались с базовой задачи — определять по мышечным сигналам, какое действие необходимо выполнить. Это требовалось для формирования управляющих команд бионическому протезу. В дальнейшем эта тематика расширилась, поскольку возникла необходимость глубже изучить сам процесс создания этих сигналов.
На начальном этапе, как и большинство наших научных коллег, мы использовали электромиографию1 для анализа двигательной активности через регистрацию электрических сигналов мышц. Однако позже стало очевидно, что одного этого метода недостаточно для полного понимания работы мышц. Электромиография фиксирует только электрическую активность, но не дает информации о механических характеристиках мышечного сокращения.
Поэтому мы решили комбинировать методы, основанные на разных физических принципах. В частности, одновременно с электромиографией мы регистрировали сигналы электрического импеданса2 и миотонограммы3. Это позволило не только фиксировать электрическую активность мышц, но и анализировать изменения их структуры и упругости во время сокращения.
Такой комплексный подход к регистрации нейромышечной активности на основе разных модальностей позволяет не только определять тип выполняемого движения и его амплитуду, но и анализировать силу сокращения мышцы и степень ее вовлеченности в процесс. Это дает возможность более точно настраивать управление протезами и реабилитационными устройствами, делая его антропоморфным.
1Электромиография — метод регистрации биоэлектрической активности скелетных мышц, основанный на измерении электрических потенциалов, возникающих при их возбуждении и сокращении. Используется для анализа функционального состояния мышечной ткани и нервно-мышечной передачи.
2Электрический импеданс (биоимпеданс) — комплексная электрическая характеристика биологических тканей, отражающая их способность противостоять прохождению переменного тока. В мышечной ткани электрический импеданс зависит от ее структурной организации, уровня гидратации, состояния клеточных мембран и степени сокращения.
3Миотонография — метод инструментальной оценки механических свойств мышечной ткани, основанный на регистрации ее упругости и тонуса. Позволяет количественно анализировать изменения жесткости, эластичности и сопротивления мышцы при ее сокращении и расслаблении.
Важным достижением стало то, что всю схемотехническую реализацию подобной комплексной регистрации сигналов мышечной активности удалось интегрировать в единый корпус электродной системы без значительного увеличения ее габаритов. Благодаря этому мы смогли сохранить устоявшуюся технологию протезирования, что впоследствии значительно упростило внедрение наших разработок.
В настоящее время мы изучаем биомеханические особенности мышечного сокращения с помощью ультразвуковых систем, которые позволяют отслеживать динамику сокращений в реальном времени. Эти данные необходимы для построения математических моделей биомеханического процесса мышечного сокращения, которые позволят установить количественные связи со значимыми параметрами регистрируемых сигналов. Особое внимание уделяется сигналу электрического импеданса, поскольку он отражает изменения структуры и состояния мышечной ткани во время работы.

Доцент кафедры «Медико-технические информационные технологии» МГТУ им. Н.Э. Баумана Андрей Николаевич Брико рассказал о новых технологиях картирования нейромышечной активности, предназначенных для управления протезами и роботами.
Фото: Ольга Мерзлякова / «Научная Россия»
Сейчас мы также исследуем перемещение мышц с помощью ультразвуковой диагностики. Этот метод помогает отслеживать динамику сокращения в реальном времени и оценивать изменения глубинных мышечных слоев, что особенно важно при создании адаптивных систем управления.
Таким образом, в ходе исследований мы изучали различные свойства мышц и их динамику при сокращении, анализируя мультимодальные измерения. Особое внимание уделялось механике сокращения мышц предплечья, выявлению наиболее информативных параметров их активности, а также определению оптимальных областей для регистрации сигналов. Часть разработанных методов уже внедрены в практику, что подтвердило их эффективность. Итогом этой работы стала заявка на премию Правительства Москвы, и высокая оценка экспертной комиссии свидетельствует о значимости наших исследований. Я рад, что наша работа получила признание, и это дает дополнительную мотивацию для дальнейшего развития направления.
— Применяются ли уже разработанные вами технологии на практике или, возможно, какие-либо разработки сейчас находятся на стадии клинических испытаний?
— МГТУ им. Н.Э. Баумана активно сотрудничает как с индустриальными партнерами, так и с научно-исследовательскими институтами. В их числе — Федеральный научно-образовательный центр медико-социальной экспертизы и реабилитации им. Г.А. Альбрехта Министерства труда и социальной защиты Российской Федерации, Российский научный центр хирургии им. ак. Б.В. Петровского, компания «Моторика». Кроме того, некоторые наши коллеги, выпускники МГТУ им. Н.Э. Баумана, погрузились в инженерное дело и основали собственные инженерные компании, занимающиеся разработками в смежных сферах.
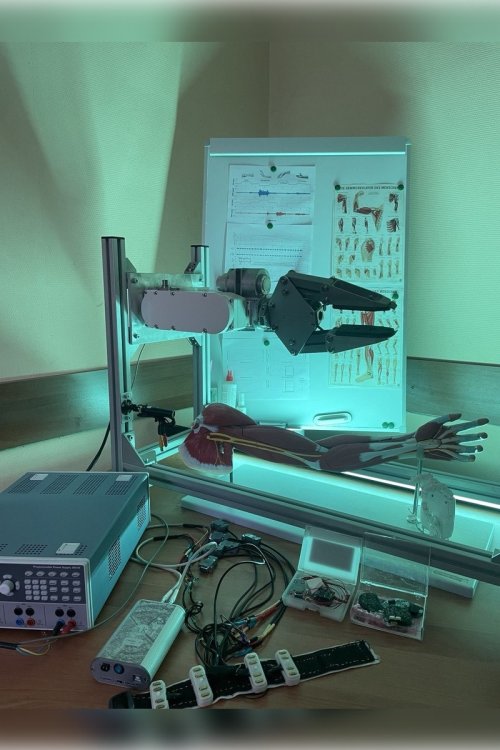
Лабораторный стенд на основе робо-манипулятора для тестирования системы управления на основе сигналов электромиограммы, миотонограммы и электрического импеданса (кафедра БМТ-2 МГТУ им. Н.Э. Баумана)
Фото: А.Н. Брико
Поскольку наша технология новая, ее внедрение в практику требует дополнительных исследований. Одно дело — тестирование методов регистрации сигналов на себе или на коллегах под контролем внутреннего этического комитета, и совсем другое — интеграция технологии в медицинское изделие с последующей апробацией на широкой группе пациентов.
Кроме того, существует значительная вариативность сигналов между здоровыми добровольцами и пациентами с ампутацией. Этот фактор создает сложности при адаптации алгоритмов: процесс съема сигналов необходимо индивидуально калибровать для каждого пользователя, оценивая эффективность управления протезом. У одного пациента уровень точности выполнения движений может достигать 99%, в то время как у другого — всего 80%. Аналогично один человек способен выполнять более широкий спектр движений, в то время как у другого их количество будет ограничено. Таким образом, испытания показывают высокую эффективность на лабораторном этапе, но при переходе к практическому применению возникают дополнительные технические и клинические сложности. Однако я уверен, что эти барьеры будут преодолены. Мы рассчитываем, что в ближайшее время технология пройдет клиническую оценку, что станет важным шагом на пути ее внедрения в медицинскую практику и коммерциализации.
— Можете привести примеры устройств, в которых используется технология картирования мышечной активности?
— Эта технология используется в различных роботизированных системах. Наиболее востребованное и очевидное направление — бионические протезы, особенно актуальные для России. Это одна из ключевых областей применения картирования нейромышечной активности, над которой мы активно работаем.
Еще одно важное направление — системы реабилитации, предназначенные для восстановления утраченных двигательных функций, например после инсульта. Помимо этого, существуют устройства, помогающие людям с ограниченной подвижностью удерживать предметы и выполнять бытовые действия. Даже если пациент не способен самостоятельно совершить движение, его намерение фиксируется в мышечных сигналах, что позволяет преобразовать их в управляющие команды для реабилитационных устройств.
Лабораторный стенд на основе роботизированного манипулятора для тестирования системы управления на основе сигналов электромиограммы, миотонограммы и электрического импеданса (кафедра «Медико-технические информационные технологии» (БМТ-2) МГТУ им. Н.Э. Баумана).
Видео: Андрей Брико
Кроме медицинских применений, технология картирования нейромышечной активности востребована и в других сферах, например при разработке роботов-манипуляторов. В рамках программы «Приоритет-2030» на нашей кафедре был реализован проект по адаптации системы управления для подводного манипулятора. Это устройство, созданное нашим индустриальным партнером — Специальным конструкторско-технологическим бюро прикладной робототехники (СКТБ ПР), управлялось с помощью браслета, надеваемого на предплечье. Мы сосредоточились на обеспечении выполнения роботом трех базовых движений: захвата и раскрытия, сгибания и разгибания, ротации. Человек выполнял эти действия, а манипулятор точно их повторял.
Еще одной перспективной областью выступает виртуальная реальность, однако это направление уже широко распространено. Отличие нашей технологии от существующих решений, таких как бионические перчатки и системы видеозахвата, заключается в том, что мы не просто фиксируем движения пользователя, но и определяем силу, с которой он их выполняет. Именно это свойство дает нашей разработке коммерческое преимущество, делая ее более универсальной и востребованной в различных приложениях.

Блок-схема принципов управления на основе сигналов электромиограммы, миотонограммы и электрического импеданса.
Изображение предоставлено А.Н. Брико
— Насколько я понимаю, работу в области картирования нейромышечной активности ведут разные научные группы. Какие особенности ваших исследований вам хотелось бы выделить и какие новые возможности открывают ваши исследования?
— Действительно, все компании, занимающиеся разработкой бионических протезов, так или иначе используют технологии регистрации биоэлектрических сигналов. Для этого широко применяется метод поверхностной электромиографии, который регистрирует электрическую активность мышц. Некоторые разработчики также применяют оптические датчики или регистрируют намерение пациента совершить движение с помощью контактных сенсоров, фиксирующих изменения формы остаточных мышц культи при сокращении. Эти сигналы затем используются для управления протезами.
Наш подход отличается тем, что мы используем мультимодальный анализ, объединяя сигналы, основанные на различных физических принципах. Помимо электромиографии, мы дополнительно регистрируем электрический импеданс мышц, который можно измерять параллельно с электромиограммой в рамках одной электродной системы благодаря разным частотным диапазонам сигналов. Кроме того, мы применяем миотонографию, позволяющую оценивать упругость мышц и степень их деформации во время выполнения движений.
Включение нескольких модальностей дает нам ряд преимуществ. Во-первых, это расширяет спектр движений, которые может выполнять пользователь бионического протеза или реабилитационного устройства. Во-вторых, это позволяет точнее анализировать силу и степень сокращения мышц, что критически важно для естественного и интуитивного управления. В результате наша технология обеспечивает более широкий функционал, повышенный процент корректных срабатываний и возможность пропорционального управления, что делает работу бионических систем более точной и удобной для пользователя.
— Отмечается, что результаты вашей работы важны для создания реабилитационных роботизированных комплексов для пациентов с нарушениями двигательной активности. Под ними подразумеваются экзоскелеты или нечто иное?
— В первую очередь речь идет о реабилитационных ортезах — устройствах, которые выполняют поддерживающие или ассистирующие движения, помогая человеку выполнять действия, недоступные ему самостоятельно. Такие системы могут выглядеть, например, как моторизованная перчатка, надевающаяся на руку и позволяющая пользователю удерживать предметы или тренировать утраченные функции.
Разумеется, экзоскелеты также представляют собой перспективное направление. Их ключевое отличие заключается в том, что они могут поддерживать как верхние, так и нижние конечности, а иногда и все тело. Соответственно, для их эффективного управления требуется регистрация сигналов не только с рук, но и с ног.
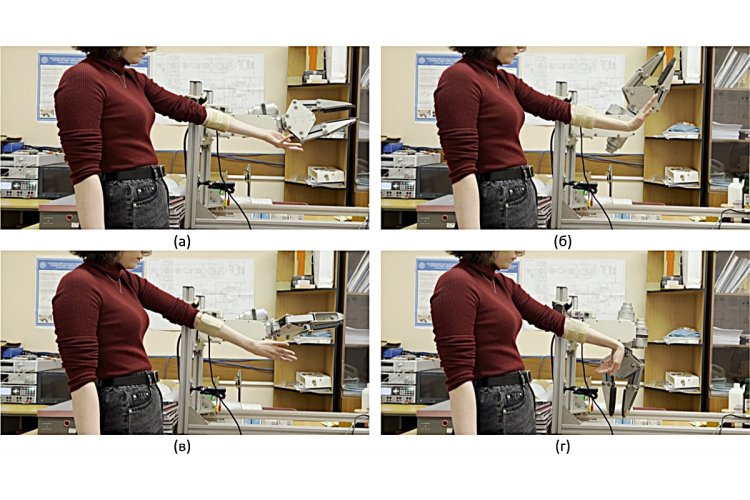
Тестирование системы управления на основе сигналов электромиограммы, миотонограммы и электрического импеданса по базовым действиям: (а) супинация, (б) разгибание, (в) пронация, (г) сгибание (каф. БМТ-2 МГТУ им. Н.Э. Баумана).
Фото: А.Н. Брико
В наших исследованиях основной акцент сделан на анализе нейромышечной активности верхних конечностей, поскольку разработанная нами технология ориентирована прежде всего на управление протезами руки и реабилитационными устройствами для пациентов после инсульта. Однако теоретически ее можно адаптировать и для экзоскелетов. Для этого потребуется дополнительное изучение биомеханики сокращений мышц нижних конечностей и тестирование системы в новых условиях. Мы рассматриваем эту возможность как одно из направлений будущей работы.
— С какими основными проблемами сталкивается сегодня разработка бионических протезов и других устройств для реабилитации людей с нарушениями двигательных функций как в России, так и в мире? Возможно, разработки вашей команды позволяют преодолеть некоторые из них?
— Это очень важный вопрос, поскольку таких проблем действительно немало.
Одна из ключевых трудностей связана с регистрацией биоэлектрических сигналов. В большинстве коммерческих протезов как отечественного, так и зарубежного производства используется поверхностная электромиография. Однако этот метод имеет ограничения: поскольку электроды считывают сигналы с поверхностных мышц культи, качество контакта играет решающую роль. Смещение электродов, изменение состояния кожи, потоотделение — все это может приводить к нестабильности сигналов и ухудшению управления. Электродная система, размещенная в гильзе протеза, должна плотно прилегать к телу, иначе точность управления снижается.
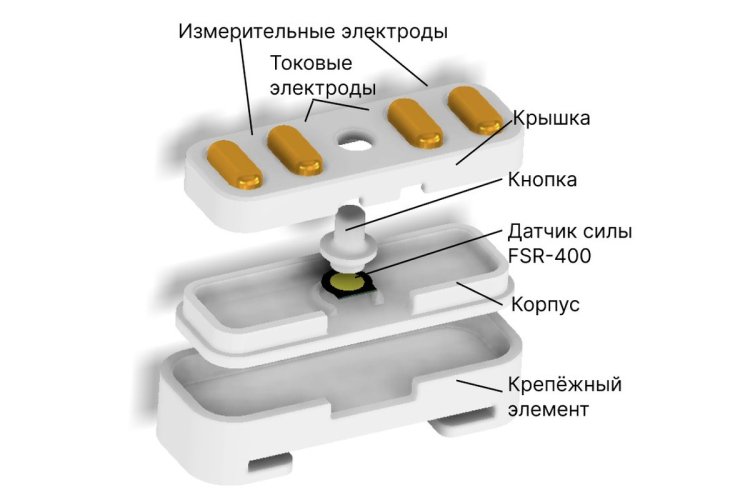
Взрыв-схема системы регистрации сигналов сигналов электромиограммы, миотонограммы и электрического импеданса (кафедра «Медико-технические информационные технологии» (БМТ-2) МГТУ им. Н.Э. Баумана).
Фото: А.Н. Брико
Вторая проблема — обработка сигналов в режиме реального времени. Для комфортного и естественного управления бионическим протезом задержка от момента возникновения намерения до выполнения движения не должна превышать 100–200 мс (миллисекунд). Однако обработка сигналов, фильтрация шумов и адаптация системы под конкретного пользователя требуют вычислительных ресурсов. Медленные алгоритмы обработки или некачественные данные могут привести к ощущению запаздывания, что затрудняет использование протеза.
Третья сложность — индивидуальная адаптация системы. Каждый пациент имеет уникальную анатомическую конфигурацию, что влияет на расположение датчиков, уровень сигнала и эффективность управления. У одного человека система может работать с высокой точностью, а у другого — демонстрировать менее стабильные результаты. Это требует персонализированной настройки протеза и индивидуальной калибровки алгоритмов, что усложняет массовое внедрение таких технологий.
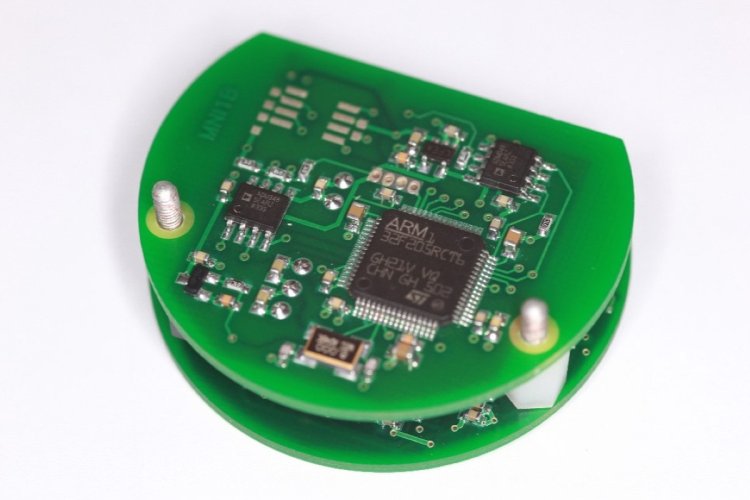
Плата управления бионическим протезом на основе нейромышечных сигналов (НИИ биомедицинской техники МГТУ им. Н.Э. Баумана)
Фото: А.Н. Брико
Традиционные протезы, работающие только на основе электромиограммы, могут выполнять ограниченный набор движений. В отличие от естественной руки, обладающей пропорциональным управлением и гибкостью, многие бионические системы до сих пор остаются дискретными, то есть управляют движениями только по заранее заданным командам. Это снижает удобство использования и ограничивает возможности пользователя.
Преодоление этих проблем — достаточно актуальная задача. Анализ научных публикаций показывает, что это направление активно развивается, и мы надеемся, что в будущем удастся преодолеть существующие ограничения. Наш подход основан на комбинированной регистрации сигналов, использующей разные физические принципы в рамках единой электронной системы. Дополнительно мы исследуем биомеханику мышечного сокращения, что позволяет нам выйти на новый уровень в анализе и интерпретации нейромышечной активности.
— Могут ли результаты ваших исследований пригодиться в каких-либо других сферах, помимо медицины? Вы уже упоминали создание робота-манипулятора, возможно, есть что-то еще?
— Основное ограничение при применении нашей технологии за пределами медицины связано с необходимостью контакта электродной системы с кожей человека, что не всегда удобно и практично. Например, зарубежная компания Thalmic Labs разрабатывала устройство, аналогичное нашим технологиям, основанное на регистрации электромиографических сигналов. Оно представляло собой браслет, который надевался на предплечье и позволял управлять компьютеризированными интерфейсами — например, перелистывать слайды движениями руки. Однако проект был закрыт, что, вероятно, связано с недостаточным удобством использования или невысоким спросом со стороны пользователей.
Одновременно большие перспективы применения нашей технологии открываются в области производства медицинских изделий, о которых я уже рассказал, или антропоморфных роботизированных систем, требующих управления с пропорциональным контролем силы. В частности, перспективным направлением представляется создание систем тактильной обратной связи. Это позволит оператору ощущать сопротивление при взаимодействии с объектами, что особенно важно при работе с хрупкими предметами, такими как яйцо или стекло. Благодаря этому можно будет более точно регулировать силу захвата, предотвращая повреждение объектов. В настоящее время данное направление находится на стадии исследований и разработки полноценных устройств.
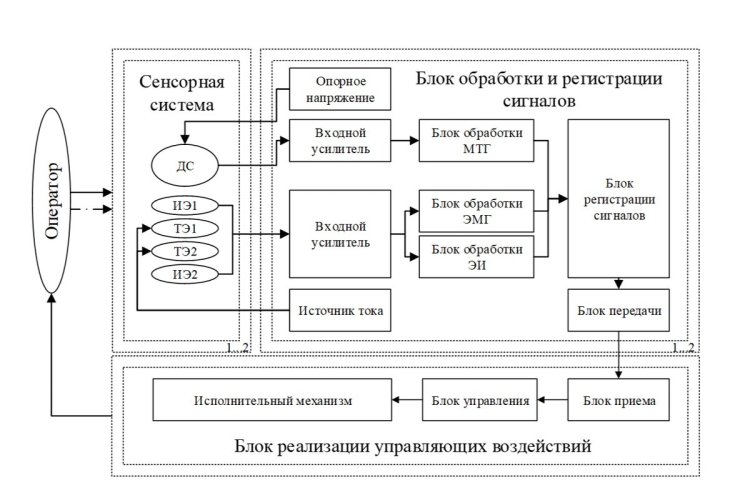
Блок-схема биотехнической системы управления на основе сигналов электромиограммы, миотонограммы и электрического импеданса.
Изображение предоставлено А.Н. Брико
— Какие другие исследования вашей команды вам хотелось бы выделить? Возможно, даже что-то, совсем не связанное с картированием нейромышечной активности?
— В первую очередь, я ассоциирую нашу команду с кафедрой «Медико-технические информационные технологии», где ведутся исследования в самых разных направлениях. У нас работают несколько специализированных лабораторий, каждая из которых занимается разработкой передовых медицинских технологий.
Помимо картирования нейромышечной активности, одно из значимых направлений нашей работы — разработка интерфейса «мозг — компьютер». В этом случае электроды располагаются не на предплечье, а на скальпе головы, и по зарегистрированным сигналам определяется намерение испытуемого выполнить движение или взаимодействовать с внешней средой. Однако у данного метода есть существенное ограничение — серьезная задержка сигнала, достигающая 300 мс, что делает его менее комфортным для пользователя и ограничивает практическое применение в реальном времени.
Другие исследования нашей кафедры связаны с электромагнитной реабилитацией и оценкой кровенаполнения органов. В частности, активно развивается направление картирования сердечной активности. Один из наших коллег недавно защитил диссертацию, посвященную электроимпедансным методам картирования работы сердца. Разработанная им технология позволяет анализировать смещение и геометрические изменения сердца на основе электроимпедансных сигналов. Этот подход открывает новые возможности для диагностики и мониторинга состояния сердечно-сосудистой системы, что имеет большое значение для кардиологии.

Андрей Николаевич Брико: «Наша первоочередная задача — внедрение технологии в широкую практику».
Фото: Ольга Мерзлякова / «Научная Россия»
— Какие исследования в обсуждаемой области вы готовитесь проводить в дальнейшем? Возможно, планируется каким-либо образом совершенствовать уже созданные технологии или, напротив, создавать что-то совершенно новое?
— Наша первоочередная задача — внедрение технологии в широкую практику. От экспериментального макета до готового медицинского изделия — большой путь, который требует участия специалистов медико-технического профиля. Именно таких профессионалов готовит наш факультет «Биомедицинская техника». Разработка опытного образца, проведение технических и клинических испытаний, регистрация медицинского изделия — этапы, которыми мы планируем заниматься в ближайшей перспективе.
В долгосрочной перспективе мы стремимся не только развивать текущие технологии, но и углублять исследования в данной области. Одно из направлений, которым мне хотелось бы заняться, — электроимпедансная томография области предплечья. В привычном понимании томография ассоциируется с магнитно-резонансными и компьютерными методами, однако существует еще один вид — электроимпедансная томография. Ее ключевое отличие заключается в том, что она позволяет строить карты поперечного среза тканей на основе удельной электрической проводимости, что дает возможность анализировать структурные и функциональные изменения мышц. Такой метод особенно ценен для медицинской диагностики и реабилитации, поскольку позволяет объективно оценивать состояние мышечной ткани. Я надеюсь, что в ближайшем будущем смогу внести вклад в развитие этого направления, применяя уже зарекомендовавшие себя методы и разрабатывая новые подходы к анализу нейромышечной активности.
— Были ли у ваших исследований какие-либо неожиданные результаты? Возможно, какие-то открытия, давшие новое представление о том, как работает мышечная система человека, или какие-то неожиданные вопросы, которые вставали в процессе работы?
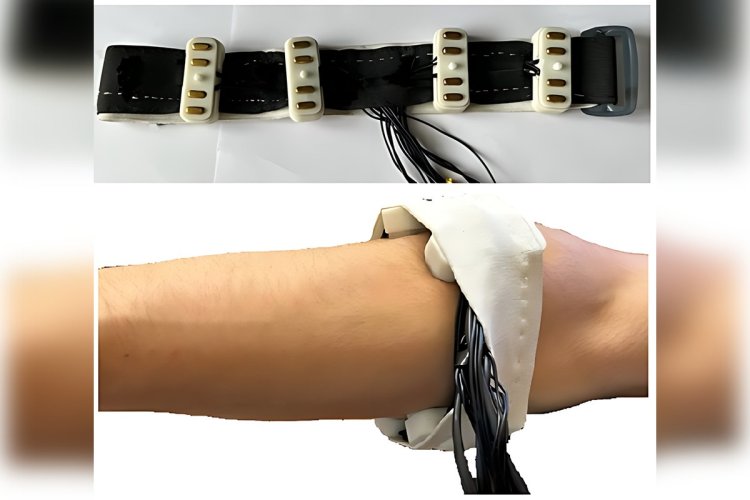
Наручная система для регистрации сигналов сигналов электромиограммы, миотонограммы и электрического импеданса, созданная в МГТУ им. Н.Э. Баумана.
Фото: А.Н. Брико
— Поскольку мы выполняем картирование нейромышечной активности с использованием различных физических принципов, мы регистрируем не только электрическую активность мышц, но и их биомеханические параметры, включая упругость и структурные изменения мышечной ткани. Такой комплексный подход позволяет получить более полное представление о механике мышечного сокращения и его физиологических особенностях.
В настоящее время мы анализируем корреляции между нашими данными и результатами ультразвуковых исследований, компьютерной и магнитно-резонансной томографии, чтобы построить целостную модель механизмов мышечного сокращения. Разумеется, в результате будут получены модельные, обобщенные представления, но для их практической ценности важны обоснование, калибровка и подбор точных параметров.
Мы надеемся, что в ходе дальнейших исследований удастся разработать новые валидированные и верифицированные модели мышечного сокращения, которые не только расширят фундаментальные знания о работе мышечной системы, но и найдут применение в диагностике, реабилитации и разработке управляемых бионических систем.
— Поделитесь эмоциями от вручения премии Правительства Москвы. Была ли награда неожиданностью или она скорее стала ожидаемым результатом долгой упорной работы?
— Подобные награды — всегда приятная неожиданность. Конечно, это радость и, в первую очередь, гордость за нашу команду — за то, что нам удалось вывести наши исследования на уровень, который был высоко оценен экспертной комиссией. Хочу подчеркнуть, что эта награда — не только наша с Владиславой Вячеславовной заслуга, но и результат работы всего коллектива нашей кафедры, вклад каждого участника которого имеет огромное значение.
Разумеется, такое признание вдохновляет и мотивирует. Подобные премии не только приносят яркие эмоции, но и стимулируют дальнейшую работу, привлекая молодых специалистов к перспективным направлениям исследований. Это сигнал о том, что наша научная тематика актуальна, востребована и поддерживается на высоком уровне.
Что касается ожиданий, то в конкурсах такого уровня нельзя быть уверенным в победе. Любая подача заявки, будь то грант или премия, — это всегда определенный вызов, и конечный результат зависит не только от качества работы, но и от решений экспертного сообщества. Однако если заявка сильная, то шансы на успех, конечно, высоки.
Мы очень рады, что получили поддержку и признание. Это дает дополнительный импульс к развитию нашего направления и укрепляет уверенность в значимости наших исследований.
Интервью проведено при поддержке Министерства науки и высшего образования РФ
Источники изображений на странице: Ольга Мерзлякова / «Научная Россия», предоставлены А.Н. Брико (автор — А.Н. Брико).







































{kind=link}