

Инженерно-Технические разработки
РОБОТ ДЛЯ И(KEA)
Новый механизм может собирать стулья по Принципу «Сам себе мастер».
Любой, кто провел целый день, ломая голову над тем, как собрать мебель IKEA из их элементов, высоко оценит и соблазнится на то, чтобы такую работу сделал бы за него робот.
Шведская компания разработала комплекс DIY (сделай сам), что можно считать точкой отсчета для специалистов в области роботехники, которые потратили годы на создание умных автоматов, способных вкручивать болты и гайки в отверстия.
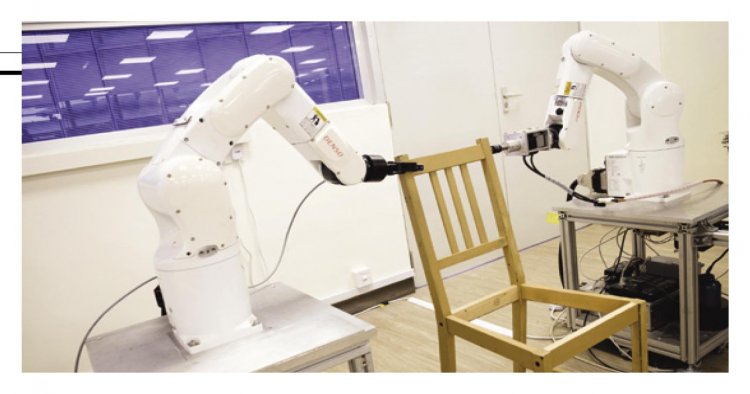
Инженеры Технологического Университета Нанянг в Сингапуре собирали СТЕФАН стул, применив для сборки двурукий робот, сенсорные датчики и программное обеспечение которого позволяет проводить сборку большинство деталей частей без помощи человека.
Команда сообщала о своем достижении в апрельском номере журнала «Теоритические основы в Роботехнике». Используя его руки, параллельные захваты- кисти, сенсорные датчикам и 3-D камеру, агрегат выполнял последовательно примерно 50 шагов, заложенных в инструкции по сборке, и за 20 минут собрал каркас стула.
Более того, робот был изготовлен из деталей со склада готовой продукции, которые уже «находятся в массовом производстве», и таким образом технология, которую мы создали может применятся на действующих производствах в самом ближайшем будущем»,- говорит Куанг-Куонг Фам, доцент механический и космические технологии, который создал робот совместно с Франсиско Суарес-Руисом и Сиань Жоу, оба работающих в Технологическом Университете Нанянг.
Название изображения
Инженеры запрограммировали робот, применив обычный машинный код вместо того, чтобы обучать устройство собирать детали через самообучение. Они сфокусировались на способности робота к распознаванию, планированию и контроле в большей степени чем на абстрактной способности к осмыслению, - говорит Фам.
Движения руки робота могут выглядеть медленными и трудоемкими, но его способность погонять и соединять штифтами отверстия является одной «из наиболее сложных проблем в роботехнике,»,- говорит Росс Кнеппер, помощник профессора информатики в Университете Корнелл, кто не участвовал в работе инженеров из Нанянга.
Кнеппер входил в состав команды Массачусетского института Технологий . которая в 2013 году сконструировала так называемую систему автономных роботов «IkeaBot», которая с успехом осуществляла сборку столов в мебельной компании LACK.
«Принимая во внимание тот факт что в моей работе был применен метод системы технического зрения для решения задачи «шплинт –в- отверстие» Инженеры из Нанянга решают эту задачу посредством тактильной обратной связи – ощущения , действительно ли шплинт вошел в отверстие»,- говорит Кнеппер. «Для сборки мебели IKEA можно применять эти два подхода, но вклад в роботехнику различный».
Технология команды из Нанянга предназначена для того, чтобы быть перепрограммируемым продуктом для выполнения различных задач — включая возможность сборки и других видов мебели. «Мечта»,- говорит Кнеппер, - состоит в том, чтобы создать такую систему роботов, которая могла бы производить сборку всех позиций каталога мебели IKEA — но она пока не достижима».
источник Журнал Саентифик Американ №08 2018 Стр. 22
Автор: Лэрри Гринемеир
Перевод: Энигма Л.Н.























{kind=link}