


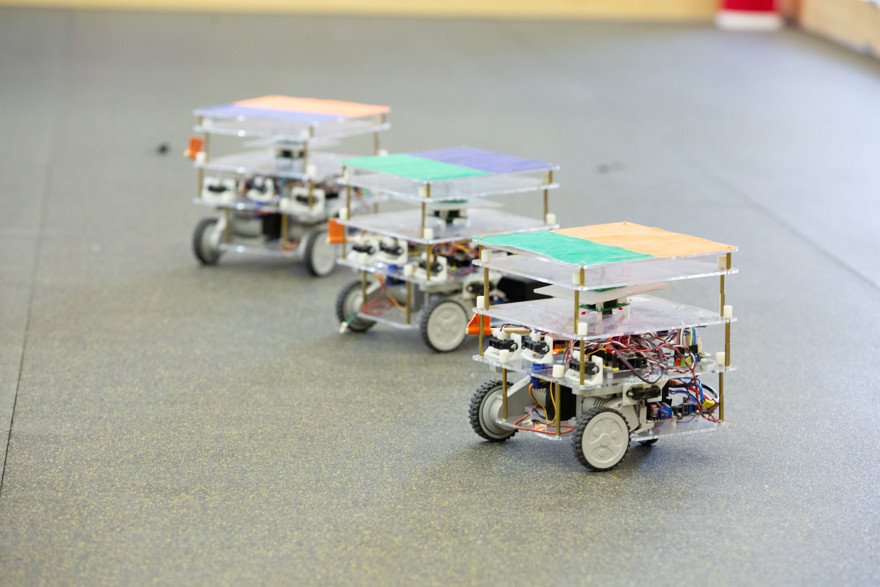
Роботы давно перешагнули со страниц фантастических произведений в нашу действительность. В комплексе НБИКС-природоподобных технологий Курчатовского института создаются группы роботов-аниматов, поведение которых моделируется на примере социальных насекомых — пчел и муравьев.
В научно-исследовательской группе работают сообща математики, физики, программисты, инженеры, нейропсихологи, нейробиологи, мирмекологи — специалисты, изучающие муравьев. Поведение этих удивительных существ поражает воображение. Зачем нужны эти исследования и к чему они приведут — наш разговор с кандидатом технических наук Валерием Эдуардовичем Карповым, заведующим лабораторией робототехники Курчатовского комплекса НБИКС-природоподобных технологий Национального исследовательского центра «Курчатовский институт».
— Валерий Эдуардович, мы находимся в окружении огромного количества самых разнообразных роботов — от андроидов, похожих на нас с вами, до каких-то невероятных машин и механизмов. Расскажите, пожалуйста, чем вы здесь занимаетесь. Играете в роботов?
— Я бы сказал, что от игр мы уже давно перешли к самым разным исследованиям. Это и интеллектуальные системы управления, и создание киберводителя, и исследования энергетической автономности роботов, ну и главное наше ударное направление — групповая робототехника.
— Что это такое? Знаю, что вы строите модели группового поведения роботов на основе изучения пчел или муравьев...
— Групповая робототехника — это направление, которое появилось больше четверти века назад, и основная идея ее достаточно проста и понятна. Если нам надо решить какую-то сложную задачу, то вместо того чтобы создавать некое единое большое универсальное интеллектуальное устройство, попробуем ее решить, создав несколько более простых, которые ее преодолеют групповым взаимодействием.
Идея с технической точки зрения здравая, ведь существует масса преимуществ такого подхода—надежность, универсальность, гибкость и прочее, и прочее, но выяснилось, что продвижение на этом пути вовсе не такое стремительное, как ожидалось вначале.
— Почему же?
— Пресловутые системные эффекты, переход количества в качество, или эффекты, связанные с таким понятием, как эмерджентность. не очень явно, но все же проявляются. Однако в основном сейчас групповая робототехника решает задачи совместного движения. Это базовый уровень, с чего все и начиналось. И у нас возникла идея: а что могло бы лечь в основу принципов создания действительно качественно новых систем? Ответ очевиден: природа уже давно прошла по этому пути, создав такие замечательные организмы, которые образуют социум. Ведь социум — это далеко не только человек, но и животные, птицы, а прежде всего мир насекомых, которые не от хорошей жизни стали образовывать сложные группы, коллективы, помогавшие им выжить.
Как было заложено изначально М.В. Ковальчуком при создании нашего комплекса НБИКС-природоподобных технологий, мы пошли по пути природоподобия и постарались исследовать вопрос: а можно ли создать механизмы, которые позволяют роботам организовать социум со всей сложностью взаимодействия, со всеми синергетическими эффектами и т.д.? За основу был взят мир насекомых. Есть специальное обозначение для некоторых видов общественных насекомых—это эусоциальные, или истинно социальные сообщества, и типичный представитель— это муравей, а также пчелы, осы и т.д.
Мы начали в лаборатории исследовать этот вопрос, создавать различные механизмы и, самое главное, смотреть, что лежит в основе организации социума, какие механизмы позволяют группе роботов вести себя так, а не иначе.
— Вы поняли, что лежит в основе?
— Как нам кажется, да. По крайней мере, были разработаны базовые модели, методы, которые, взаимодействуя друг с другом, позволяют получать новое качество управления. Например, тем же биологам, этологам известно, что очень важна роль агрессии в отношении между животными. Важна роль механизмов когезии, или контагиозного поведения (контагиозностъ, или заразное поведение, — базовый принцип, который означает реакцию системы на какой-то стимул, управляющий поведением целой совокупности. — Примеч. ред.), обучения и т.д. Разумеется, этими вопросами занимались и кибернетики, и биологи, и прочие специалисты, а наша задача заключалась в том, чтобы рассмотреть эти механизмы, вычленить их и реализовать в том или ином виде в робототехническом устройстве. Действительно, оказалось, что совокупность определенных «строительных элементов» позволяет решать интересные задачи. Изучение этих базовых механизмов, их взаимодействие между собой и составляет наше магистральное направление деятельности.
— Каким же образом ваши роботы взаимодействуют друг с другом? Они тоже проявляют агрессию, контагиозность, способность к обучению?
— Да, обязательно. Например, когда раздается сигнал опасности, то робот, насекомое, птица или любой живой организм, не видя самого объекта опасности, начинает воспроизводить защитную реакцию. Это эволюционно очень выгодно, поскольку позволяет управлять массами искусственных или животных организмов. Подражательное поведение оказалось наиболее сложным. Не так легко понять, что же делает особь, которая находится рядом с нами, причем не только определить, что она куда-то движется, но и распознать ее состояние. Потом выяснилось, что не обойтись без языкового взаимодействия. Но язык — это отдельная тема, очень непростая, однако необходимая.
— Мы-то привыкли считать, что у насекомых никакого языка нет, но на самом деле там действует чрезвычайно сложная система коммуникации.
— Язык— это еще более интересная вещь, чем просто коммуникация. Система коммуникации — это основа для передачи языковых сообщений, а вот язык — это уже устройство системы управления, которая есть и у насекомых. Мы стали разбираться с системой управления, и выяснилось, что те вопросы, которые нас изначально не интересовали и казались очень далекими, вдруг приобрели очень важное значение.
— Например?
— Ну, например, вопросы, а нужны ли эмоции в том же роботе. Оказалось, что да: эмоция — не просто красивый, эффектный термин, она крайне важна с точки зрения организации системы управления. Без эмоций она плохо работает или не работает вовсе.
— А каким образом робот может быть эмоциональным? Ведь эмоции — это проявление работы нервной системы, которой у них нет.
— Мы просто смотрим на это с технической точки зрения. Есть свойства эмоций, которые для нас принципиальны, например регулятивная функция эмоций — то, что позволяет нам контрастировать восприятие, фильтровать поступающие сигналы. Это технически необходимые вещи, и они в наших роботах есть и позволяют им вести себя более-менее адекватно в сложной динамически меняющейся среде. Так что это не выражение эмоций, а внутреннее свойство психики робота.
— Значит, у них есть темперамент?
— Да. Этим термином мы пользуемся, описывая поведение робота: особенности психики, реакции на внешние сигналы тоже крайне важны, и поэтому понятие темперамента оказалось также технически обусловленным. Мы начали с того, что у нас появился робот с двумя регуляторами, которые можно было подкручивать и превращать его поведение из такого, которое мы оцениваем как сангвинистическое, в такое, которое мы называем, например, флегматическим. Или меланхоличное.
— Вы переключаете эти темпераменты? То есть он из холерика превращается в меланхолика?
— Конечно. Можно рассуждать на ином языке, в терминах классической теории управления. Но по большому счету, с точки зрения описания особенностей поведения робота, особенно в группе, это просто более конструктивно. В какой-то среде более приспособленными и адекватными показывают себя роботы, бурно реагирующие на все изменения, и тогда у нас получается холерический характер. А в какой-то среде не надо отвлекаться на разного рода воздействия, а надо идти к своей цели. Тогда лучше, чтобы это был флегматик. Все эти вещи оказались крайне практически востребованы.
— А для чего это востребовано? В какой, например, среде может быть востребован робот- холерик?
— Когда среда динамически меняется и требуется быстрая и внятная реакция на изменение условий, тогда вам нужен холерик. Например, если среда представляет собой множество опасных действующих факторов. Скажем, представьте себе поведение робота-спасателя, где есть огонь, обрушения, ямы и прочее. В этой среде он должен быстро и внятно реагировать, иначе он просто разрушится. Или есть задача исследования территории, когда явно угрожающих факторов нет, но воздействие среды весьма интенсивное. Природные условия необходимо зафиксировать, исследовать. Тогда робот должен меланхолично или флегматично следовать заданному маршруту, не отвлекаясь нате внешние факторы, которые бы потребовали его внимания в условиях пожара или землетрясения.
— Иначе говоря, такие роботы могут выполнять самые разнообразные функции там, где не обязательно присутствие человека. Те же стихийные бедствия или ликвидация последствий аварий, где для человека находиться опасно, а для роботов ничего страшного.
— С одной стороны, это так. С другой — мы не говорим о том. что занимаемся созданием роботов, которые действуют в условиях повышенной опасности. Мы говорим о том, что у нас есть некая парадигма, которая позволяет описывать механизмы управления в более адекватных для данной конкретной задачи терминах. А конкретные задачи могут быть самые разнообразные.
— Существует распространенная точка зрения, что коллективные насекомые могут жить только в социуме, а по отдельности они не функционируют. Говорят даже, что муравейник — это коллективный разум. С вашими роботами так же?
— И да и нет. Начну с последнего. Что такое коллективный разум, я не очень понимаю. Это звучит красиво, но совершенно неконструктивно с научной точки зрения. Конечно, никакого коллективного разума нет. Природа устроена более цинично. Если мы посмотрим на механизмы, которые наблюдаются у тех же муравьев, то поначалу они действительно поражают воображение, нам непонятно, каким образом они взаимодействуют, учатся, как строится их профессиональная карьера, каким образом образуются такие высшие формы организации социального устройства, как федерации. Потом начинаем расспрашивать мирмекологов, пытаемся разобраться в этих механизмах, и оказывается, что в основе всего этого лежат очень рациональные, понятные и конструктивные вещи. Мы знаем: для того чтобы реализовать процесс профессионального роста, молодой муравей начинает жить на дальней территории, потом постепенно подбирается на участки, находящиеся ближе к гнезду, и вершина его карьерного роста — работать наблюдателем на куполе гнезда, при этом он знает все, что находится вокруг, он самый опытный и всегда может кого-то подменить. Если рассмотреть эту задачу детально, оказывается, что в основе этого механизма, который мы промоделировали и получили какие-то реальные результаты, лежат особенности памяти муравья или те вещи, которые мы обычно относим к агрессии.
— Мы привыкли думать, что агрессия— это плохо.
— Оказывается, это важнейший инструмент эволюции. Роботы тоже должны проявлять агрессию как способ себя реализовать, продемонстрировать, например, эффект доминирования.
— Но они не начнут проявлять агрессию по отношению к своим разработчикам? Это же вечная тема, многократно обыгранная в фантастических произведениях: машины, которые уничтожат человечество.
— С точки зрения робототехники, агрессия — это больше метафорическое понятие. И дальше такого понимания агрессии двигаться мы не планируем, потому что это неконструктивно. Но что такое агрессия? Защитная реакция, связанная с конфликтом между двумя особями, когда надо определить доминантную? Агрессия ведь проявляется не только в том, что кто-то кому-то что-то сломал, откусил, уничтожил. Это может быть и демонстрация. Об агрессии говорят очень много и в негативном контексте, зачастую не понимая, что это такое. А нам она важна, чтобы наши роботы, встретившись на каком-то участке, могли определить, кто остается, кто уходит. При таком понимании мы получаем возможность определения лидера в коллективе, что также необходимо. Появился лидер — появилась неоднородность. Следующий шаг— это распределение задач. У тех же муравьев кто-то выполняет одну задачу, кто-то другую, Один носит, другой питается. Это не потому, что у них есть высокое сознание или коллективный разум. Там работают более понятные вещи. Он — муравей — находится здесь, на кормовом участке, потому что он просто сильнее, его не выгнали. Эти базовые механизмы составляют основу для очень сложного, внешне непонятного, шокирующего воображение обывателя механизма. Мы тоже начинаем вычленять какие-то механизмы, которые наблюдают биологи, и смотрим, а что же из нашего набора базовых социальных моделей, алгоритмов позволит реализовать ту или иную манеру поведения.
— Так могут ли они существовать по отдельности?
— По отдельности им просто тяжело, они не могут решить задачу. Если говорить о биологии, то, например, муравьи — те же самые редуцированные пчелы. Что-то случилось с кормовой базой, и им пришлось сообща решать свои проблемы. Если говорить о робототехнике, то существует практическая задача — создание систем, которые были бы энергетически автономными, чтобы они пребывали на какой-то природной территории. Совершенно очевидно, что наши возможности по переработке природного топлива сейчас весьма скромны. Ну не получается у нас создать робота, который смог бы. например, выжить в лесу. Значит, надо в лес запускать не одного робота, а нескольких. Наверное, надо сделать так, чтобы одни роботы — легкие, но быстрые — занимались разведкой, а другие обеспечивали электроснабжение.
— А что им надо искать в лесу? Не грибы же?
— Допустим, у вас есть некая территория, которая должна контролироваться. Это может быть задача охраны, разведки, патрулирования, поиск пропавших людей, но без участия человека. Мало ли что там с природой на территории творится. Одного робота, который смог бы выжить без подготовленной энергетической базы, создать сложно. Тогда начинается создание роботов, которые выполняют разные функции. Это вполне технически обусловлено.
— Как реализовать взаимодействие между этими роботами, чтобы они могли эту задачу решать?
— Опять же, можно подсмотреть у природы, как решалась эта задача. Тогда мы начинаем понимать: для того чтобы эта группа роботов выжила в сложной обстановке, в которой по отдельности не выживают, нужно, чтобы у них реализовывался механизм распределения функций. Для этого в природе нужен доминант. Для этого нам нужен механизм, который в биологии называется контагиозным поведением. А еще нужно, чтобы они подражали друг другу. И когда мы начинаем с этой точки зрения подходить к процедуре организации управления такой группой роботов, то получаем неизбежный вывод — да, эта группа ведет так, как ведет себя социум.
— Получается, что каждый из этих роботов — индивидуальность?
— Да. К сожалению, это так.
— Почему же к сожалению?
— Беда в том. что изначально в групповой робототехнике не просто декларировалось решение задачи в совокупности роботов, но делался особый упор на то, что роботы, или агенты, или сущности, или аниматы, как мы их называем, — примитивные, простые. Это всех радовало и устраивало. Казалось, что примитивные автоматы волшебным образом дадут синергетический эффект взаимодействия друг с другом. А потом выяснилось, что особь, которая живет в социуме, в принципе не может быть примитивной. Ей очень многое надо уметь анализировать, понимать, запоминать. Потому что все механизмы, о которых мы говорим, — это совсем не просто. Скажем, на основе языкового взаимодействия строится то самое контагиозное поведение, иначе не получается. Необходимо иметь развитую память и заниматься не просто воспроизведением или запоминанием чего-то, а обустройством каких-то ассоциаций, выработкой рефлексов и т.д. Нужно иметь способность определить состояние члена группы. Я не хотел бы говорить, что член социума роботов должен быть интеллектуальным, потому что интеллектуальная робототехника— это отдельная история, однако должно быть что-то близкое к этому. Иначе эти механизмы не работают.
— Расскажите, что сейчас представляют собой ваши роботы, что вы с ними делаете, как используете?
— В Курчатовском институте группировка мобильных роботов, пожалуй, одна из самых больших в нашей стране. Нам удалось создать некую архитектуру из 20 аниматов, с помощью которых мы сейчас занимаемся в основном фундаментальными исследованиями на специально созданном полигоне, по которому они и движутся.
— А каким образом они движутся? Это дистанционное управление?
— Вся система живет так, что нет единого управляющего центра с точки зрения определения их поведения. А технически могут быть варианты. Эта программа может располагаться на бортовой вычислительной машине, и у нас есть роботы побольше, где стоит весьма неплохой вычислитель. Массовые эксперименты мы проводим на машинах попроще, где на борту нет мощного контролера, и поэтому основные вычисления идут в удаленной машине. Это не вопрос, где стоит вычислитель. Будь он на колесах, рядом или где-то далеко. С точки зрения управления поведением это неважно. Они пытаются, общаясь друг с другом, решать какие-то задачи — ну, например, организуют процедуру выбора лидера среди роботов.
— Они сами выбирают лидера или вы им в этом помогаете?
— Мы не лезем в их управление. В этом весь смысл. Социум должен быть устойчивым и самодостаточным, самоорганизующимся. Есть какие- то законы взаимодействия между членами этого общества. Если мы начинаем туда внедряться, нарушать каналы связи и взаимодействия, то мы просто-напросто можем разрушить полученную структуру. Управление социумом — очень сложная тематика, которой мы сейчас занялись. Это управление их мотивацией, потребностями. Социумом можно управлять более хитро, изменяя среду обитания, аккуратно вмешиваясь во что-то, но при этом совокупность должна остаться целостным организмом.
— Не возникает аналогии с творцом?
— Возможно. Года через полтора, когда мы доберемся до следующей ступени — где роботы смогут сами организовывать социум со своими целями и задачами, механизмами взаимодействия, — тогда наша модель мира будет полной.
— Модель мира?
— Это не метафора, так называется система знаний, правил, которая лежит в основе системы управления аниматом. Таким образом, в модель мира должен быть встроен некий компонент, который выдает императивы поведения. Причем встроен так, чтобы у агента не было на его счет особых рефлексий. Начнутся рефлексии — система пойдет вразнос. Это вещи куда более сложные, чем энергетика или агрессия. В систему знаний, в картину мира должна быть встроена некая внешняя управляющая сущность, которая не подлежит анализу, обсуждению. Она есть сама по себе. Робот не должен вокруг нее рефлексировать. Но это уже вопрос, наверное, теологического плана.
— Как известно, Творец сказал: «Плодитесь и размножайтесь». А как у роботов с функцией размножения?
— Любой биолог нарисует вам прежде всего репродуктивную функцию. Но, к счастью, мы не стали совсем категорично разбираться с брачным поведением, сбрасывать его со счетов, хотя поначалу были такие поползновения. Оказалось, что с этой стороной жизнедеятельности связано некоторое количество весьма важных механизмов. Ну, например, обычно к этой категории относят то, что касается защиты потомства и воспитания. Выяснилось, что само по себе брачное поведение аниматов нам, робототехникам, неинтересно. Но штука в том. что те механизмы, которые лежат в его основе, позволяют реализовывать такие забавные вещи, как, например, социализация члена другого социума в этом коллективе. Кстати, чем нам особо нравятся муравьи, так это тем, что обучение как таковое, то есть приобретение новых навыков, у муравьев отсутствует, и значит, нам не надо тратить время на обучение новым навыкам наших роботов. Все, чему муравьи могли научиться за миллионы лет эволюции, — они уже умеют. В каком-то смысле муравей — это биоробот, у которого есть огромный набор программ.
— А какие у вас вообще задачи? Чего вы хотите добиться на выходе?
— На выходе мы хотим добиться явного синергетического эффекта— то есть создать систему, которая может решать качественно новые задачи, не связанные с арифметическим суммированием возможностей, особенностей каких-то организмов. Например, наши роботы, собираясь вместе, выбирают лидера, проголосовав за кого-то, а затем могут заняться тем, что называется «логический вывод в группе». Они, уже собравшись воедино, могут решать какие-то сложные задачи, проводить анализ, доказывать какие-то утверждения либо опровергать их для того, чтобы, например, определить, какие участки пространства приоритетны в смысле исследования, какие — опасны, на что можно не обращать внимания. Все это может свестись к процедуре логического вывода, давно известному механизму, но у нас сделано так, что теперь роботы, реально собравшись воедино на некую конференцию и избрав ведущего, могут решать эту задачу. Это яркий пример того, как количество переходит в качество. Это и есть синергетический эффект.
— Это сообщество роботов может быть помощником человечеству в решении ряда его насущных задач. Именно это они будут означать для человечества?
— Да, конечно. Для человечества это будет значить появление нового способа решения тех или иных задач. Перечислять области, в которых могут применяться системы групповой робототехники, — дело неблагодарное. Их слишком много. Это огромный круг задач — от медицины до добычи полезных ископаемых, исследований воздушного, подводного, космического пространства, задачи мониторинга или охраны, проведение спасательных операций и т.д.
— У Станислава Лема есть рассказ «Формула Лимфатера», где главный герой создал машину, сверхсовершенную во всех отношениях. В своих исследованиях он тоже отталкивался от социальных насекомых. Его машина знала и умела все, и первый вывод, к которому она пришла, — человек на этом витке эволюции просто не нужен. Это была даже не агрессия, а просто констатация факта. Вы не думали на эту тему?
— Думал, но немножко на другую. У того же Лема есть замечательный роман «Непобедимый». Наверное, из глубин далекого детства, когда я его читал, и родился мой интерес к этой тематике. Но что касается того, нужен ли человек, — это все-таки больше философские вопросы. И опасность думающих машин— это тема неисчерпаемая. На мой взгляд, тут гораздо интересней другое. В копилку потенциальных опасностей для человечества я бы действительно положил опасность взаимодействия социума роботов, или искусственных агентов, с человеком. Если окажется, что социум устойчив, что он будет жить по своим законам, при этом не будут пересекаться наши цели и задачи, то, что мы называем ценностями, — тогда это может быть чем-то неожиданным и опасным. Социум— система по определению более адаптивная, надежная, чем отдельная особь, с которой справиться, наверное, легче, чем с множеством связанных отношениями представителей животного или техногенного мира. Это интересно— как могут сосуществовать между собой различные социумы. И, кстати, как ни странно, вопросы философского характера для наших роботов и их социального поведения тоже крайне актуальны. На уровне описания поведения нужно понять, насколько важен для данного социума, данных условий императив «Не навреди».
— Нравственный императив?
— Да. Помоги ближнему своему. Что такое хорошо, что такое плохо. Насколько важна, например, такая вещь, как эмпатия? Оказалось, что эмпатия— для нас термин абсолютно не философский, не нравственный, а тоже вполне технически обусловленная вещь, потому что на эмпатии, сопереживании строится механизм сопоставления того, что я вижу, с тем, что в картине мира называется «субъективное "я"». Все цепляется одно за другое. И оказывается, что чем дружелюбнее наш анимат по отношению к своим товарищам, чем больше он им сопереживает, тем сильнее то, что мы называем эмпатией. Это означает, что у него сопоставление наблюдаемого с тем, что есть в картине мира, происходит интенсивнее. В проекте по управлению социумом мы активно сотрудничаем также с нейробиологами Курчатовского комплекса НБИКС-природоподобных технологий, которые обитают в соседней лаборатории и занимаются исследованием в том числе свойств памяти. Нам очень важно в этом проекте понять, как они объясняют механизмы социального обучения, что происходит на их нейрофизиологическом уровне. Мы ждем от них конструктивных моделей, чтобы потом реализовать все это в системе управления и системе знаний нашего робота. Хотим привлечь к нашей работе также биоэнергетиков. Так что, конечно, управление социумом — это не только робототехника. Курчатовский институт — уникальный научный центр, поскольку под одной крышей работают замечательные специалисты из самых разных областей.
■
Беседовала Наталия Лескова



























{kind=link}