

Используя так называемую органическую нейроморфную схему, ученые провели робота через лабиринт, обучив его прокладывать путь исходя из собственного опыта, сообщает пресс-служба Института полимеров Макса Планка (Германия). Результаты эксперимента описаны в журнале Science Advances.
«Мы хотели использовать эту простую установку, чтобы показать, насколько мощными могут быть такие "органические нейроморфные устройства" в реальных условиях», – отмечает Имке Краухаузен из Технического университета Эйндховена (Нидерланды).
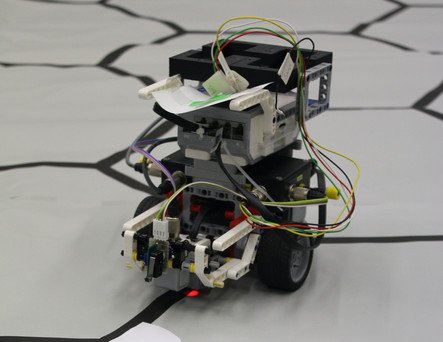
Чтобы робот мог перемещаться внутри лабиринта, ученые снабдили интеллектуальную адаптивную схему сенсорными датчиками, которые реагируют на сигналы из окружающей среды. Путь лабиринта к выходу был обозначен визуально на каждом перекрестке. Изначально робот часто неверно интерпретировал визуальные знаки и поэтому поворачивал не в ту сторону. Когда робот принимал эти решения и шел по неправильному тупиковому пути, он получал корректирующие стимулы. Корректирующие стимулы – например, когда робот ударяется о стену – напрямую прикладываются к органической цепи через электрические сигналы, которые посылает сенсорный датчик, прикрепленный к роботу. Каждый раз, когда робот снова заходил в лабиринт, он постепенно учился принимать правильные решения и поворачивать в нужную сторону, чтобы больше не получать корректирующие раздражители. На 16-й попытке робот нашел выход из лабиринта.
В будущем разработка откроет совершенно новые возможности для приложений в робототехнике, человеко-машинных интерфейсах и медицинской диагностике, надеются авторы работы.
[Фото: MAX PLANCK INSTITUTE FOR POLYMER RESEARCH]
























{kind=link}