

«Фотоакустическая бортовая гидролокаторная система» может быть установлена под дронами для обеспечения возможности проведения подводных аэрофотосъемок и составления карт глубин океана с высоким разрешением, - пишет eurekalert.org со ссылкой на IEEE Access.
Инженеры разработали воздушный метод для визуализации подводных объектов, комбинируя свет и звук, чтобы преодолеть, казалось бы, непроходимый барьер на границе раздела воздуха и воды.
Исследователи предполагают, что их гибридная оптико-акустическая система однажды будет использоваться для проведения биологических исследований моря с помощью дронов с воздуха, проведения крупномасштабных воздушных поисков затонувших кораблей и самолетов и картирования глубин океана с аналогичной скоростью и уровнем деталь как пейзажи Земли.
«Бортовые и космические радиолокационные и лазерные системы, или лидары, на протяжении десятилетий могут наносить на карту ландшафты Земли. Радиолокационные сигналы могут даже проникать сквозь облачный покров и зону покрытия растительного покрова. Однако морская вода слишком сильно их поглощает, чтобы получать изображения в воде, - сказал руководитель исследования Амин Арбабиан, доцент кафедры электротехники. - Наша цель - разработать более надежную систему, которая может отображать изображения даже в мутной воде».
Океаны покрывают около 70 процентов поверхности Земли, но лишь небольшая часть их глубин подверглась визуализации и картированию с высоким разрешением.
Главный барьер связан с физикой: звуковые волны, например, не могут переходить из воздуха в воду или наоборот, не теряя большую часть - более 99,9% - своей энергии на отражение от другой среды. Система, которая пытается видеть под водой, используя звуковые волны, идущие из воздуха в воду и обратно в воздух, дважды подвергается этой потере энергии, что приводит к снижению энергии на 99,9999%.
Точно так же электромагнитное излучение - общий термин, который включает световые, микроволновые и радиолокационные сигналы - также теряет энергию при переходе из одной физической среды в другую, хотя механизм отличается от звука. «Свет также теряет часть энергии из-за отражения, но большая часть потерь энергии происходит из-за поглощения водой», - пояснил первый автор исследования Эйдан Фицпатрик, аспирант в области электротехники. Между прочим, это поглощение также является причиной того, почему солнечный свет не может проникать в глубины океана и почему ваш смартфон, который полагается на сотовые сигналы, форму электромагнитного излучения, не может принимать звонки под водой.
Результатом всего этого является то, что океаны нельзя отображать с воздуха и из космоса так же, как на суше. На сегодняшний день большая часть подводного картирования достигается путем прикрепления гидролокаторов к судам, которые отслеживают данный интересующий регион. Но этот метод медленный, дорогостоящий и неэффективный для покрытия больших площадей.
Фотоакустический бортовой гидролокатор (PASS) сочетает свет и звук для преодоления границы раздела воздух-вода. Идея его создания возникла из другого проекта, в котором микроволновые печи использовались для бесконтактной визуализации и определения характеристик подземных корней растений. Некоторые инструменты PASS изначально были разработаны для этой цели в сотрудничестве с лабораторией профессора электротехники Бутруса Хури-Якуба.
В своей основе PASS использует индивидуальные сильные стороны света и звука. «Если мы сможем использовать свет в воздухе, где свет распространяется хорошо, и звук в воде, где звук распространяется хорошо, мы сможем получить лучшее из обоих миров», - сказал Фитцпатрик.
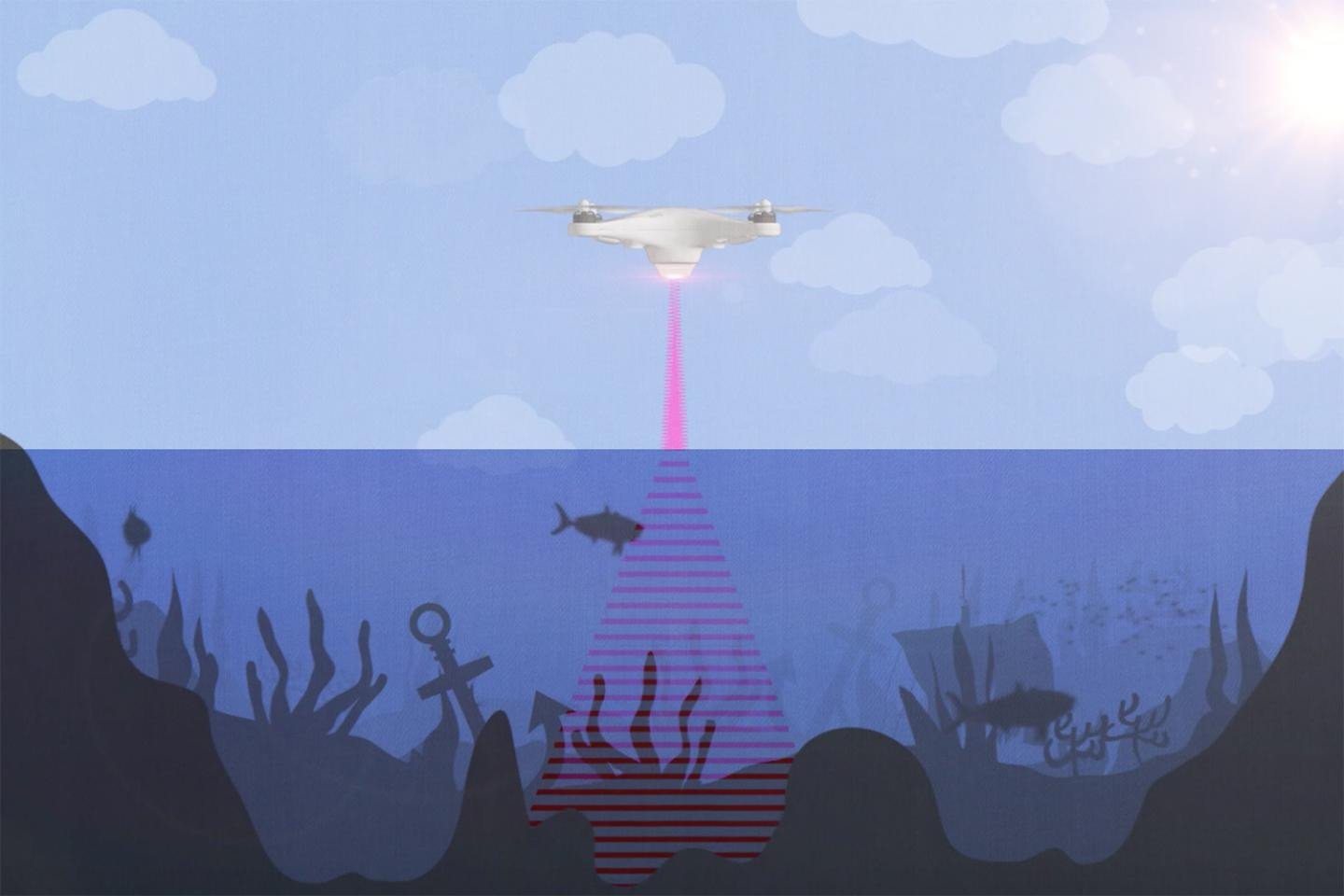
Для этого система сначала запускает лазер из воздуха, который поглощается поверхностью воды. Когда лазер поглощается, он генерирует ультразвуковые волны, которые распространяются вниз через толщу воды и отражаются от подводных объектов, прежде чем вернуться к поверхности.
Возвращающиеся звуковые волны все еще теряют большую часть своей энергии, когда они пробиваются через поверхность воды, но, генерируя звуковые волны под водой с помощью лазеров, исследователи могут предотвратить двойную потерю энергии.
«Мы разработали систему, которая достаточно чувствительна, чтобы компенсировать потерю такой величины, но при этом позволяет обнаруживать сигналы и получать изображения», - сказал Арбабиан.
Отраженные ультразвуковые волны регистрируются приборами, называемыми преобразователями. Затем используется программное обеспечение, чтобы собрать акустические сигналы вместе, как невидимую головоломку, и восстановить трехмерное изображение подводного объекта или объекта.
«Подобно тому, как свет преломляется или «изгибается», когда он проходит через воду или любую среду, более плотную, чем воздух, ультразвук также преломляется, - объяснил Арбабиан. - Наши алгоритмы восстановления изображения исправляют это изгибание, которое происходит, когда ультразвуковые волны проходят из воды в воздух».
Обычные гидролокаторы могут проникать на глубины от сотен до тысяч метров, и исследователи ожидают, что их система в конечном итоге сможет достигать таких глубин.
На сегодняшний день PASS был протестирован только в лаборатории в контейнере размером с большой аквариум. «В текущих экспериментах используется статическая вода, но в настоящее время мы работаем над устранением волн на воде, - сказал Фитцпатрик. - Это сложная, но, мы думаем, выполнимая задача».
Следующим шагом, по словам исследователей, будет проведение испытаний в более крупных условиях и, в конечном итоге, в открытой воде.
«Мы видим эту технологию на борту вертолета или дрона, - сказал Фитцпатрик. - Мы ожидаем, что система сможет летать на десятки метров над водой».
[Фото: eurekalert.org]
























{kind=link}