

В 1979 г. на советские экраны вышел фильм «Приключения Электроника». Казалось, что вот-вот ученые создадут и первых человекоподобных роботов, и их биоморфных спутников. В фильме таким питомцем выступил пес Рэсси (аббревиатура, расшифровывающаяся «редчайшая электронная совершенная собака и так далее»). Задача оказалась гораздо более сложной: не хватило ни вычислительных мощностей, ни материалов и компонентов, ни фундаментальных знаний...
И только сегодня более или менее известны и начинают создаваться роботы-собаки. А роботы — птицы и рыбы еще остаются на стадии прототипов, требующих решения множества проблем, хотя потенциал таких разработок уже заметен, причем не в качестве дорогих красивых игрушек. В России такие задачи решает коллектив лаборатории нейробиоморфных технологий МФТИ.

Фото: Елена Либрик / «Научная Россия»
Руководитель лаборатории нейробиоморфных исследований В.Б. Казанцев: «Исследованиями нейронных сетей в мозге и его моделированием ученые занимаются ровно с того момента, когда стало понятно, что мозг общается с помощью электрических импульсов. Так, больше 100 лет назад сформировалась так называемая нейронная доктрина. Тогда ученым казалось, что раз они поняли, как работает мозг, то получится и быстро создать его искусственный аналог. Все эти попытки провалились».
В какой-то степени приблизиться к воплощению мозга в техническом исполнении получилось относительно недавно, с развитием искусственных нейронных сетей. Возникло также понимание, что для обучения нейронных систем, созданных по примеру живого мозга, требуется условное тело, которому передавались бы команды. При этом оболочка такого искусственного мозга должна соответствовать живым объектам: ходить на ногах или лапах, плавать, шевеля хвостом и плавниками, летать, маша крыльями, ― подражая живому мозгу, важно подражать и образу движения.
В.Б. Казанцев: «Идеология нашей научной группы в том, что обучение нейроподобных сетей невозможно без тела. В английском языке есть термин embodiment ― тело для искусственного интеллекта. И понятно, что это воплощение не может быть колесным: колес в природе нет, но есть мышцы. Поэтому основная задача ближайших лет ― создание искусственной мышцы. В 1952 г. Герберт Саймон сказал: “Тот, кто владеет искусственным интеллектом, будет властелином мира”. Я немного перефразирую: властелином мира станет тот, кто создаст искусственную мышцу. Дело в том, что мы сегодня умеем создавать нейронные сети, а с появлением мемристорных технологий не за горами то время, когда они воплотятся в миниатюрных энергоэффективных устройствах. Но остается открытым вопрос их обучения: для этого нам нужны машины, созданные под системы управления мозгом. Такими машинами могут стать биоморфные роботы, и именно поэтому сейчас возник такой интерес и искусственным собакам, птицам и рыбам».

Виктор Борисович Казанцев
Фото: Елена Либрик / «Научная Россия»
Прикладная эффективность биоморфных роботов для отдельных задач уже показана. Например, роботы-собаки ― единственные роботы, способные подниматься по лестницам: уникальная возможность, которой нет ни у человекоподобных, ни у колесных или гусеничных образцов. Более того, такие роботы частично уже вышли из стадии прототипов, появились на рынке и используются для помощи человеку. Роботы-рыбы ― например, созданный в Балтийском федеральном университете им. Иммануила Канта тунец ― в перспективе будут способны исследовать подводные объекты и рельеф и наблюдать за водными обитателями. Искусственные роботы-птицы в отдельных странах уже распугивают живых над аэропортами, а потенциально найдут применение в видеонаблюдении и разведке.
Важнейшее преимущество роботов, похожих по структуре на животных и способных перенять принцип их движения, ― энергоэффективность. Эволюция создала условия для того, чтобы живое существо тратило минимум энергии на определенные процессы, в том числе на перемещение: например, птица в отличие от квадрокоптера может парить, подхватывая воздушные потоки. Но вот что удивительно: за долгие годы изучения птиц и рыб ученые так и не поняли до конца принципы и биомеханику плавания или полета до такой степени, чтобы искусственно воплотить их с хотя бы приближенной эффективностью. А решив эти задачи, можно будет задумываться над созданием летательных, надводных и подводных аппаратов совершенно нового типа.
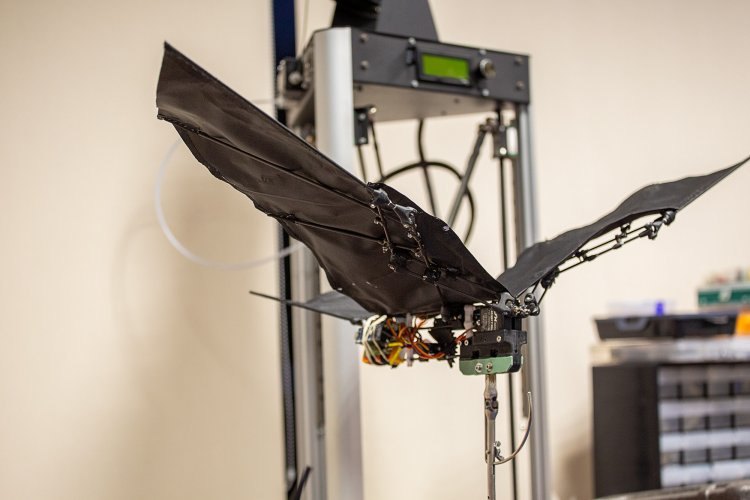
Прототип робота-птицы с изменяемой площадью крыла ― одно из возможных решений в области эффективного полета. Живые птицы в полете способны изменять площадь крыла, складывая его, изгибать, двигать одним крылом сильнее, чем другим. Например, соколы, разворачиваясь по дуге при парении, ставят крылья под разным углом, чтобы использовать воздушные потоки и не тратить энергию. Прототип, созданный в МФТИ, позволяет отдельно управлять каждым крылом и изменять их площадь. Ученые создают отдельные прототипы, каждый из которых позволит исследовать определенный параметр полета.
Фото: Александр Бурмистров / «Научная Россия»
Инженер И.В. Митин: «Мы решаем задачи по моделированию биоморфного полета: полет птицы по маневренности и энергоэффективности лучше, чем полет существующих квадрокоптеров. Основная проблема летательных и подводных аппаратов — во времени автономной работы: на сколько хватит аккумулятора, установленного на борту. Понятно, что бесконечно увеличивать их количество невозможно, поэтому энергию надо использовать эффективнее. Например, живые птицы очень экономно тратят энергию для долгого полета, маневрирования и набора высоты. Эти механизмы мы хотим освоить и использовать в дальнейшем при разработке компактных летательных аппаратов».
Прототип робоптицы в виде канюка, созданный в МФТИ, летать умеет. Аккумуляторов хватает минут на 40, а дальность ограничена передатчиком сигнала: установленный сейчас позволит улететь на 2 км. Но робот не умеет взлетать, его приходится запускать с руки. Пока задачу самостоятельного взлета не удалось решить ни одной научной группе в мире: сложный принцип движения крыльев и большое количество степеней свободы у роботов делают вычисления в этой области отдельной фундаментальной задачей. Ученые говорят, что воссоздать эту сложную механику можно и с помощью написанных человеком алгоритмов, но заранее прогнозируют, что нейросети справятся эффективнее. Нейросети также потенциально способны решить вопрос маневренности роботов-птиц: известны видеоролики, на которых живой сокол аккуратно пролетает между плотно стоящими людьми. Теоретически на это способен и робот, искусственный разум которого вносил бы коррективы в движение даже при ошибке со стороны оператора устройства.
В.Б. Казанцев: «Чтобы взлететь, робот должен изменить положение крыла. Этим должна управлять искусственная нейронная сеть: от мозга до периферийных отделов. Именно в решении подобных задач, а не в создании условно игрушечных прототипов — основная задача нашей лаборатории. Прототипы служат только телом для этой нейросети».
Знания о мозге, электронике и их взаимодействии теперь будут концентрироваться в новом научном журнале «Нейротехнологии & нейроэлектроника». Там будут публиковать результаты исследований в области биологических и искусственных нейронных сетей, математических моделей работы мозга, мемристивных устройств и нейроинтерфейсов.

Фото: Елена Либрик / «Научная Россия»
























{kind=link}