

Птицы сбиваются в стаи, чтобы эффективнее добывать пищу и перемещаться. Рыбы образуют косяки, чтобы избежать хищников. А пчёлы роятся, чтобы размножаться. Последние достижения в области искусственного интеллекта направлены на имитацию этих естественных процессов, чтобы улучшить поисково-спасательные операции или выявлять очаги лесных пожаров, распространяющихся на обширных территориях, — за счёт скоординированных действий дронов или роботов. Однако разработка средств управления и использования этого типа ИИ, или «роевого интеллекта», оказалась непростой задачей.
В недавно опубликованной статье международная группа учёных из Нью-Йоркского университета описывает систему, разработанную для развития роевого интеллекта, которая позволяет управлять роением подобно тому, как это происходит в природе.
«Одна из самых сложных задач при разработке роботизированных роев — найти децентрализованный механизм управления, — объясняет Матан Ях Бен Цион, доцент Центра когнитивных исследований и один из авторов статьи, опубликованной в журнале Proceedings of the National Academy of Sciences. — Рыбы, пчёлы и птицы отлично справляются с этой задачей — они формируют великолепные структуры и функционируют без единого лидера. В отличие от них, синтетические рои далеко не так подвижны, и управлять ими в крупномасштабных целях пока невозможно.
Исследовательская группа решила эти проблемы, разработав правила геометрического проектирования для кластеризации самодвижущихся частиц. Эти правила моделируются с помощью естественных вычислений — аналогично «положительным» или «отрицательным» зарядам протонов и электронов, которые лежат в основе формирования материи.
Согласно этим правилам, активные частицы, движущиеся под действием внешней силы, обладают внутренним свойством, которое заставляет их изгибаться. Исследователи называют это свойство «кривизной». «Кривизна определяет коллективное поведение роя, что указывает на возможность потенциального контроля над тем, сбивается ли рой в стаи, движется ли он или группируется», — объясняет Мартиниани, доцент кафедры физики, химии и математики.
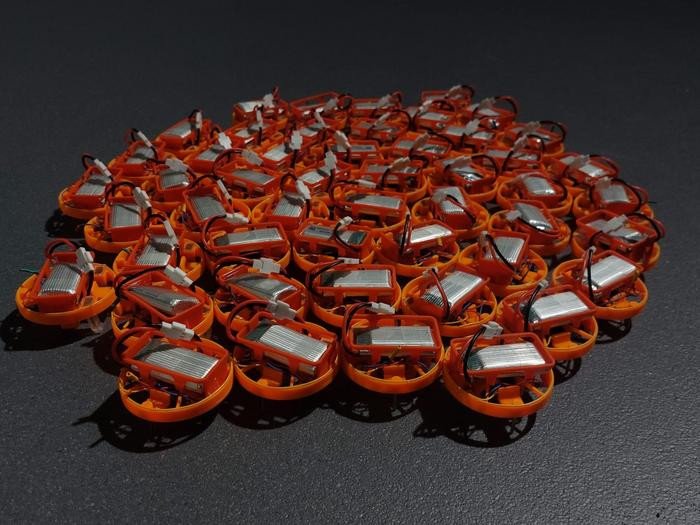
Вывод был подкреплён серией экспериментов, в ходе которых учёные показали, что критерий, основанный на кривизне, управляет притяжением между парами роботов и естественным образом распространяется на тысячи роботов. Каждый робот рассматривался как объект с положительной или отрицательной кривизной, и, подобно электрическому заряду, эта кривизна управляла взаимодействием роботов.
«Величина, похожая на заряд, может принимать положительные или отрицательные значения и быть напрямую закодированной в механической структуре робота, — объясняет Бен Цион. — Как и в случае с зарядами частиц, значение кривизны определяет, как роботы притягиваются друг к другу, чтобы образовать кластер, или отталкиваются, чтобы сформировать стаю».
Если найти правило проектирования геометрической природы, например, кривизны, то его можно будет применять к промышленным роботам или роботам для доставки, а также к микроскопическим роботам размером с клетку, которые смогут улучшить доставку лекарств и другие методы лечения.
«Самое лучшее в этих правилах то, что они основаны на элементарной механике, что упрощает их реализацию в физическом роботе», — добавляют ученые. «В широком смысле эта работа превращает задачу управления роями в задачу материаловедения, предлагая простое правило проектирования для разработок в области роевой инженерии».























{kind=link}