

Вячеслав Демин и Михаил Ковальчук

В процессе взаимодействия с окружающей средой человек «на лету», не задумываясь, распознает огромное количество разных образов даже в условиях неполных данных о них.
Цели и средства
Начнем с пояснения актуальности создания систем искусственного интеллекта. Прежде всего, мы говорим о нейроморфных системах. В этой области в мире ведутся разработки по ряду направлений.
Первое направление – создание интерфейсов «мозг – компьютер» и нейропротезов. С достигнутыми на сегодня техническими характеристиками они актуальны в основном для людей с травмами конечностей, с ограниченными возможностями, либо для пациентов, парализованных частично или полностью. В перспективе интерфейсы «мозг – компьютер» могут также быть применены для управления сложными техническими системами – такими как роботизированные комплексы, летательные аппараты и другие крупные и/или распределенные машины. Такой интерфейс будет полезен, например, оператору атомной электростанции, который должен следить за огромным количеством датчиков.
Второе направление – разработка так называемых нейроаниматов, т.е. попытка функциональной связи специально обученной культуры живых нервных клеток с робототехническим устройством или другой машиной. Культуры выращивают из стволовых клеток – предшественников нейронов и уже взрослых нейронов в специальной питательной среде в лабораторной чашке. К ним подводятся электроды, которые считывают сигналы с клеток или воздействуют на них с помощью электрических импульсов. Таким образом можно пытаться обучать живые нейроны управлению техническими системами – роботами и другими машинами, в том числе виртуальными. Это молодое направление, практических результатов в нем пока мало, но показано, что создание таких гибридных систем возможно в принципе, поэтому перспективы есть.
Третье, традиционное направление, которое развивается с 40-х годов ХХ в., – создание систем искусственного интеллекта. Оно заключается в программной и аппаратной реализации искусственных нейроморфных систем, похожих в смысле принятия решений и производимых операций на технику взаимодействия человека или высших животных, обладающих развитой нервной системой, с внешней средой.
В первую очередь такие устройства нужны для решения так называемых антропоморфных задач, т.е. задач, с которыми человек сталкивается ежесекундно при взаимодействии с объектами из внешней среды и решает их легко за счет специальной, частично заданной генетически, а частично сформированной и обученной в течение жизни архитектуры нервной системы. Эти задачи с точки зрения математики некорректны, т.к. заданных условий недостаточно для их однозначного решения. Именно поэтому они столь сложны для традиционных вычислительных систем. В то же время наш мозг научился решать их приблизительно оптимально.
Одна из таких задач - распознавание образов, с которым сталкивается человек при первичной обработке поступающей информации – восприятии. Мы видим, слышим или тактильно ощущаем большое число объектов, которые одновременно, параллельно классифицируются у нас в мозге. Надо помнить, что для обычного компьютера, например, визуальные образы – всего лишь набор простейших геометрических объектов: линий, углов, контрастов и т.п. Поэтому распознавание образов – одна из функций, которыми желательно снабдить машину. В нашем мозге это происходит начиная с первичной зрительной коры, в которой распознаются элементарные геометрические фигуры. На следующем слое восприятия, во вторичной зрительной коре, эти элементы объединяются друг с другом, образуя более сложные элементы. В итоге эти элементы складываются в единое целое, например в человеческое лицо, которое мы воспринимаем как вполне определенный отдельный класс объектов. Для такой классификации нам не нужны детали, определяющие, например, лицо данного человека. Тем не менее наличие совокупностей плохо формализуемых признаков (формы и типа овала лица, носа, ушей и т.п.), которые хорошо «усваиваются» нейронными сетями, позволяет нам отличить лицо от морды обезьяны. Так происходит абсолютно со всеми объектами, которые мы видим.
Одно из главных достижений в области современного искусственного интеллекта – то, что принцип распознавания образов частично удалось реализовать в современных технических системах программным образом с помощью искусственных нейронных сетей. Вместе с тем в настоящее время машина достаточно хорошо может распознавать статические объекты, но не динамические сцены. Например, ей пока крайне трудно распознать действия.
Другой пример задач, которые мы решаем даже не задумываясь, – кратковременное планирование и управление: например, сделать шаг и не упасть или дотянуться до стакана с водой, взять и поднести его ко рту и т.п. Мы лишь мыслим высокоуровневыми целями (дойти до объекта, попить воды), а наш мозг формирует множество не осознаваемых нами низкоуровневых команд по управлению сотнями мышц исполнительных устройств (например, конечностей), чтобы выполнить поставленные задачи.
Далее следует отметить эмоции, которые модулируют, т.е. трансформируют наши цели в процессе изменения внешних условий. Допустим, мы хотим съесть банан, идем к цели, но из кустов выбегает тигр, у нас вырабатывается адреналин, и эмоция страха заставляет изменить цель и бежать в направлении от хищника. Поэтому систему «эмоционального восприятия» нужно создавать и для машин, в первую очередь для самосохранения и сохранения жизни и здоровья окружающих. Во вторую очередь это необходимо для корректной адаптивной коммуникации с людьми.
К подобного рода задачам относится также проблема принятия краткосрочных решений: когда мы распознали объект или действие, нужно решить, что с этим делать дальше.
Как уже было отмечено, эти некорректные задачи с неполными данными имеют бесконечное количество вариантов их решения. Человек на основе опыта выбирает один из возможных, чтобы решить ту или иную задачу. Стоит отметить также, что у каждого индивида способ решения может быть свой в зависимости от его опыта и знаний, зафиксированных в нервных сетях всего организма. Всему этому хорошо было бы обучить машину.

М.В. Ковальчук — член-корреспондент РАН, президент НИЦ «Курчатовский институт», руководитель Курчатовского комплекса НБИКС-технологий.
Учись учиться
Какими еще полезными свойствами обладают биологические нейронные сети помимо способности решения антропоморфных некорректных задач? Способность к обучению – важное свойство. Если человек научился шагать по ровной местности, это означает, что он умеет ходить по любой в целом ровной поверхности независимо от деталей ее рельефа, – его мозг адаптируется к ним. В этой задаче мы сталкиваемся с огромным количеством вариантов, и в каждом случае нужно принять оптимальное решение. Это называется обучением с обобщением и принципиально отличается от «слепого» запоминания всей поступающей информации, например всех деталей рельефа на любых ровных поверхностях. И в этом случае подход нейронных сетей позволяет реализовать такое обучение в компьютерных и специализированных нейроморфных системах. Высшая функция интеллекта в плане обучения - выработка способности к овладению новыми отраслями знания. Данная функция, видимо, еще долго будет недоступна машинному интеллекту.
Есть понятие адаптивности – умения приспосабливаться под изменяющиеся условия или новую информацию. Если человека несильно толкнуть, с большой долей вероятности он устоит на ногах: мозг моментально пошлет сигналы мышцам, чтобы сохранить равновесие. Такой оперативной адаптивностью биологические нейронные сети тоже обладают.
Другое важное свойство - надежность, в нашем случае это способность воспринимать зашумленную информацию. Мы можем распознавать буквы, лица и другие объекты в условиях зашумления сторонним сигналом или при недостаточном освещении. Кроме того, желательно наличие устойчивости к небольшим повреждениям искусственных нейронных сетей. Ведь если удалить часть мозга, то оставшаяся сможет взять на себя ее функции, перекоммутировав сигналы так, чтобы по-прежнему эффективно решать задачи, стоящие перед человеком.
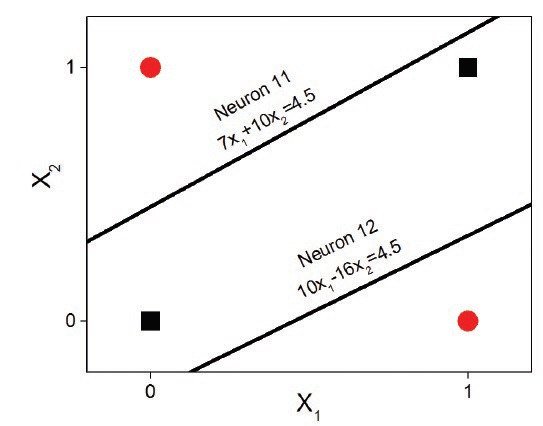
Пример простейшей линейно неразделимой задачи: классы образов («кружки» и «квадраты») не могут быть разделены одной прямой линией в пространстве входов искусственной нейронной сети (X1 и X2), а двумя прямыми — могут. Такая задача не под силу однослойным нейронным сетям с прямым распространением сигнала.
Если мы говорим о так называемом сильном искусственном интеллекте, помимо решения технических задач он должен обладать сознанием и самосознанием. Он должен не просто распознавать образы, а воспринимать их на высоком уровне – понимать смысл и испытывать чувства; не просто воспроизводить эмоции как модуляторы цели, а переживать их и т.п. Создание сильного искусственного интеллекта – пока фантастика и, по всем прогнозам, останется таковой еще десятки лет. Следует отметить, что даже сами используемые понятия, такие как сознание, смысл, чувства, переживание и прочие, определяются через другие подобные философско-психологические термины, в связи с чем не могут пока даже применяться в точных естественных науках, а тем более доводиться до уровня их физической реализации или хотя бы полноценной регистрации.
Поэтому мы будем говорить о слабых системах искусственного интеллекта, не обладающих сознанием, но способных решать определенные технические антропоморфные задачи, о которых шла речь выше.
Трудно быть роботом
Что уже сегодня умеют системы искусственного интеллекта? Они используются, в частности, в быстром трейдинге. В данную секунду миллионы операций совершаются роботами-трейдерами, и они основаны на кратковременном прогнозировании акций, валют и пр. Кроме того, это интеллектуальные системы для смартфонов и других гаджетов, а также для самоуправляемых автомобилей. Роботы все больше входят в нашу жизнь («умные» пылесосы, роботы-носильщики, устройства для устранения последствий различных аварий, дроны, беспилотные летательные аппараты и т.д.).
Но все эти устройства по уровню «развития» относятся даже не просто к слабому искусственному интеллекту, а к очень слабым в интеллектуальном плане системам, поскольку ни одна из них не обладает полным набором вышеуказанных технических свойств, а лишь выполняет отдельные элементарные интеллектуальные функции.
В частности, в преобладающем большинстве реализованных случаев работа искусственной нейронной сети заканчивается на распознавании образов. А дальше подключаются жесткие алгоритмы (типа компьютерных экспертных систем): если я увидел камень на дороге, мне надо свернуть влево на такое-то расстояние, проехать столько-то метров и вернуться на прежнюю траекторию движения.
Некоторые ученые считают, что если попробовать смоделировать последовательные системы восприятия, обработки информации и формирования управляющих сигналов в исполнительные устройства в виде нейронных сетей, то, возможно, удастся создать хотя бы слабый искусственный интеллект, который будет обладать уровнем координации действий, в определенной степени симулирующим адаптивное поведение высших млекопитающих и некоторые коммуникативные функции человека.
Какими средствами можно создавать слабый искусственный интеллект? Прежде всего, методами программной симуляции. В данный момент это наиболее развитое направление. Фактически все существующие системы, о которых говорилось выше, используют именно этот подход – это смарт-программы.
Ограничивающим фактором развития в данном случае выступает использование обычных компьютеров с архитектурой фон Неймана. В них память и процессор разъединены и общаются друг с другом через шину данных, которая и оказывается узким местом. За каждой инструкцией, каждой единицей данных процессор направляет запрос в память и получает ее назад. Это «бутылочное горло» всех последовательных систем.
В нашем мозге все происходит кардинально другим образом: каждый нейрон из почти 100 млрд представляет собой элементарный процессор, обрабатывающий информацию. Каждый такой нейрон работает независимо, параллельно с другим. И хотя его независимость условна, поскольку он получает сигналы от других нейронов, в данную единицу времени он может обрабатывать сигнал параллельно с другими процессорами-нейронами.
Человечество сейчас технически идет к реализации этого же принципа. Относительно недавно начали создавать высокопараллельные машины для обработки информации с количеством процессорных ядер от нескольких единиц до нескольких десятков тысяч (в суперкомпьютерах). В настоящее время речь идет уже не просто об увеличении количества ядер, а о создании искусственных нейронов, и не десятков тысяч, а миллионов или даже миллиардов. При этом каждый процессор-нейрон будет проще, чем отдельное современное ядро процессора, но за счет огромного их числа функциональность окажется существенно выше. С развитием нанотехнологий создание таких систем становится возможным. В подобных системах мы получаем высокую производительность нейроморфных вычислений. Именно такие суперпараллельные системы специализированы под решение антропоморфных задач с неполными данными.
Немаловажный фактор – низкое энергопотребление. Наш мозг потребляет максимум 30 Вт и решает при этом сложнейшие задачи. Если моделировать подобные нейронные сети на суперкомпьютерах, энергопотребление окажется равным энергетическим потребностям малого города. Описанная суперпараллельная система потенциально позволит снизить энергопотребление на порядки величины.
Очень важна также и автономность – возможность работать офлайн. Имеется в виду автономность не энергетическая, а от интернет-коммуникаций. Сейчас все устройства социального характера, в частности гаджеты для коммуникаций, при формировании запроса, требующего обработки интеллектуальной системой (например, распознавания речи), направляют такой запрос на удаленные высокопроизводительные сервера. Там эта информация обрабатывается, возможно, сохраняется на какое-то время, и пользователю возвращается ответ. С точки зрения безопасности информации, а также быстродействия и зависимости от наличия интернет-соединения это не лучшая система. Поэтому желательно разработать нейрочипы, способные обрабатывать такую информацию локально, на независимом устройстве.

В.А. Демин — кандидат физико-математических
наук, заместитель директора — ученый секретарь Курчатовского комплекса НБИКС‑технологий.
Мемристивная сеть
Еще в 90-е гг. прошлого столетия модели биологических клеток, нейронов, были достаточно успешно реализованы на транзисторах, других вариантов было предложено немного. Что касается методов создания синапсов, исследуемых вариантов уже больше. Их можно реализовать и на обычных транзисторах, и на транзисторах с плавающим затвором, на цифровых ячейках памяти типа статической памяти с произвольным доступом (так называемые SRAM-ячейки) и т.д.
В последнее время стало также понятно, что в качестве синапсов могут выступать мемристоры. Это резистор с памятью, электрическое сопротивление которого может меняться под действием прошедшего через него заряда. Чем больше прошел заряд, тем больше изменилось сопротивление. Причем в зависимости от полярности протекающего тока оно может меняться как в большую, так и в меньшую сторону. Это моделирует свойство синаптической пластичности, которое выражается в изменении эффективности передачи сигнала под действием самого сигнала, проходящего через этот синапс.
Существенный недостаток электронных устройств, моделирующих свойства синапсов, по сравнению с использованием мемристорных систем состоит в том, что электронные устройства на транзисторах суть цифровые устройства. Они принимают только дискретные значения, тогда как синапсы в нашем мозге могут принимать диапазоны непрерывных значений величин, – это аналоговые элементы. На основе мемристоров потенциально может также быть достигнута более высокая плотность размещения элементов на чипе, чем на транзисторных синапсах. Мемристоры с помощью нанотехнологий можно миниатюризировать до единиц нанометров. Наконец, при использовании мемристивных устройств можно добиться еще меньшего энергопотребления, поскольку они не требуют энергии для поддержания своего текущего состояния, а требуют только для его изменения.
Разработаны различные типы мемристоров, изменение сопротивления в которых происходит за счет разных физических эффектов. Один из них – на основе оксида титана, где реализовано переключение элемента из одного состояния проводимости в другое за счет дрейфа вакансий кислорода. В 2013 г. мы стали развивать также другое направление исследований, связанное с использованием мемристоров из органических материалов, а именно на основе полианилина (синтетического полимера), в котором переключение между состояниями проводимости происходит при электрохимической реакции окисления – восстановления.
Сперва была смоделирована электрохимическая реакция в пленке полианилина толщиной в несколько десятков нанометров и были численно получены зависимости тока от заряда, похожие на экспериментальные, т.е. мы правильно поняли принципы работы данного элемента. После этого мы попробовали реализовать простейшую нейроморфную сеть под названием «перцептрон». Это одна из первых моделей восприятия информации мозгом, построенная из слоя входных сенсоров и нескольких слоев нейронов. Промежуточные слои нейронов называются ассоциативными, а на выходном слое - реагирующими, или нейронами отклика. Нейроны в разных слоях, а также сенсоры с нейронами объединены мемристивными связями, выступающими в роли пластичных синапсов.
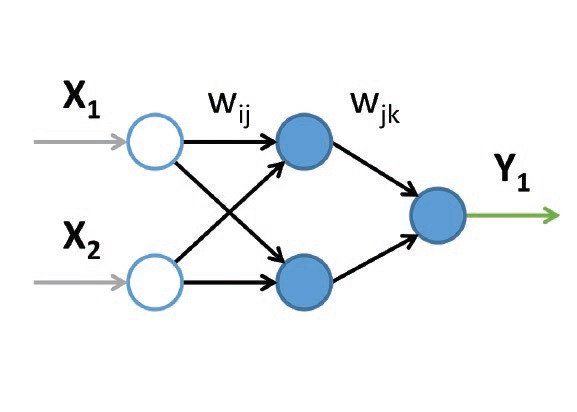
Схема двуслойного перцептрона — модели биологической нейронной сети по распознаванию образов, способной, в частности, обучиться решению представленной выше линейно неразделимой задачи.
Мы взяли самый простой однослойный перцептрон для демонстрации возможности его реализации на основе мемристоров. У нас было три сенсорных входа, всего один выходной нейрон и три мемристора между ними. Чему такую простую сеть можно обучить? Решению простейших задач типа логических функций «И-НЕ» и «ИЛИ-НЕ». Это решение принципиально не было изначально заложено в архитектуру сети, как это имеет место в традиционных триггерных схемах на базе транзисторов. Нейроморфная система была обучена этому решению посредством изменения вкладов отдельных мемристоров сети. Если на выходе перцептрона ошибка, т.е. не несоответствие значения ожидаемой величине, то на определенные мемристоры подаются корректирующие импульсы напряжения. Они меняют сопротивление мемристоров, и таким образом сеть запоминает свое новое состояние. Через какое-то количество попыток она оказывается способной решать поставленную задачу.
В результате были заложены базовые принципы технологии аппаратной реализации нейроморфных элементов, построенных с использованием мемристоров, и сетей на их основе.
Недавно нами впервые был реализован также двухслойный перцептрон. Он принципиально отличается от однослойного тем, что способен решать так называемые линейно неразделимые задачи. Это значительно расширяет класс решаемых задач с неполными данными. Поэтому реализация двухслойных и многослойных перцептронов позволит создать более совершенные нейроморфные системы для решения более широкого круга задач.
Что касается разработки элементной базы на основе неорганических материалов, одна из технических проблем существующих неорганических мемристоров – недостаточно плавное, имеющее элементы случайного характера переключение из непроводящего состояния в проводящее. В результате такое переключение сложно контролировать, т.е. изменять сопротивление на заданную величину. В то же время это необходимо для обучения нейроморфных систем. Поэтому возникла идея: создать диэлектрик, внутри которого будут равномерно распределены наногранулы металлов. В этом диэлектрике будут содержаться также вакансии кислорода, которые могут образовывать или разрушать проводящие дорожки вдоль гранул металлов под действием прикладываемого к структуре электрического напряжения. В итоге происходит более плавное переключение. Мы надеемся, что эта система может быть хорошо воспроизводима и будет обладать требуемыми характеристиками.
Задачи на будущее
Следующая большая задача – создание более сложных нейроморфных систем. Мы реализовали в абсолютно простейшем варианте однослойные и двухслойные перцептроны, а хотелось бы создать достаточно сложные интеллектуальные технические системы, которые решают серьезные задачи. Общий подход здесь можно сформулировать так: мы выбираем антропоморфную задачу, затем – подходящий тип реализуемой нейронной сети, которая программно достаточно успешно решает данный класс задач. Это могут быть перцептрон, так называемая машина Больцмана, импульсная нейронная сеть и другие типы. После этого мы подбираем аппаратные аналоги нейронов и синапсов и разрабатываем архитектуру, т.е. способ соединения нейронов и синапсов на одном чипе такой, чтобы решать конкретную задачу.
В такой формулировке этот подход нам кажется вполне прагматичным, способным привести к желаемой цели. Мы будем моделировать эти архитектуры на нашем суперкомпьютере, чтобы понять, в какой степени они решают поставленные задачи. Имеется в виду моделирование не просто искусственных нейронных сетей определенного типа, а конкретной архитектуры аппаратной системы, которую мы разработаем. Только после успешных численных экспериментов может быть принято решение о ее физической реализации «в железе».
Что касается долгосрочных и более амбициозных задач, мы планируем сосредоточиться на разработке и реализации крупноблочной архитектуры мозга на основе нейроморфных систем, включающей все или большинство принципиально необходимых для работы мозга подсистем: распознавание образов, образование ассоциаций, фокусировку внимания, принятие решений (выбор действий), осуществление действия, обучение, кратковременную и долговременную память. Как было сказано выше, в настоящее время нейросетевая реализация выполняет почти исключительно функции по распознаванию образов. Тем не менее перечисленные функциональные подсистемы мозга успешно работают на основе биологических нейронных сетей, поэтому усилия многих нейробиологов, нейрофизиологов, математиков, физиков и других ученых направлены на изучение принципов и построение моделей функционирования этих подсистем на базе искусственных нейронных и нейроморфных систем.
Например, возьмем подсистему фокусировки внимания. Как работают реализованные искусственные нейронные сети? В большинстве случаев они не сами выделяют объект: сначала обычным алгоритмическим способом выделяется рамкой интересующий объект, увеличивается, и только затем это изображение анализирует нейронная сеть. Машина самостоятельно не может сфокусироваться. Тем не менее теории и модели фокусировки внимания на уровне работы нейронных сетей существуют, и нужно предпринимать попытки их реализации и объединения с другими подсистемами.
Важный аспект - обучение сложной составной системы искусственного интеллекта. Выше речь шла об обучении с учителем. Оператор (в качестве которого может выступать обычный компьютер) знает правильные решения для тестовой выборки задач, фиксирует, правильно ли ее решает система, и в зависимости от этого корректирует вклады определенных нейронов, т.е. в нашем случае меняет сопротивления синапсов-мемристоров.
В то же время нужно постараться реализовать систему, которая бы самообучалась на физическом уровне, как мы это делаем на основе каких-то внешних сигналов из окружающей среды. Это называется обучением без учителя. В другом случае используется некий подкрепляющий сигнал типа «горячо – холодно» (как в детской игре). В частности, так обучают и дрессируют животных. Искусственной системе можно подавать закодированный сигнал подкрепления либо антиподкрепления. Этот способ называется обучением с подкреплением. Решаемая в настоящее время проблема - это разработка таких методов обучения и самообучения на физическом уровне. Отдельная, почти не решенная и слабо прогрессирующая проблема - это вопрос обучения непосредственно во время функционирования предобученной сети. Так, в мозге животных постоянно происходит перезапись не только новой информации, но и старых воспоминаний; мозг всегда пластичен в отличие даже от математических нейронных сетей, в которых стадия обучения отделяется от стадии функционирования системы.
Для получения собственного опыта, способствующего обучению и развитию, искусственную интеллектуальную систему целесообразно снабдить некоторым робототехническим или даже биологическим «телом» («нейроанимат наоборот»), снабженным сенсорами различной модальности, чтобы система сама могла взаимодействовать с окружающей средой, либо, если обучение происходит в виртуальной среде, снабдить ее какими-то виртуальными сенсорами-программами. Это одно из самых молодых и активно развивающихся направлений, которое носит название «Адаптивное поведение» или просто «Аниматы».
Настоящая работа – яркий пример успешной реализации в НИЦ «Курчатовский институт» конвергентного подхода в создании природоподобных технологий.
Авторы особо хотят отметить роль ученых НИЦ «Курчатовский институт», принимающих активное участие в развитии этого проекта: В.В. Ерохина, М.Л. Занавескина, П.К. Кашкарова,С.Н. Чвалуна, Л.А. Фейгина
























{kind=link}