


Инженеры из лаборатории автономных систем МФТИ в Жуковском создают небольшого робота, способного плавать в океане до полугода. Из-за сходства с летательным аппаратом его называют подводным планером.
Беспилотники под водой востребованы не менее чем в воздухе. Океанологи давно используют небольшие автономные аппараты для наблюдения за течениями, измерениями солености и загрязнения воды. Об одном из них — SeaBED, созданном в Океанографическом институте в Вудс Хоул в США, — портал Научная Россия недавно рассказывал.
В нашей стране подводные беспилотники не производят, купить их за рубежом нельзя — не продают. А интерес к ним у исследователей океанов велик, причем во всем мире. В этом Максим Овдиенко, один из разработчиков подводного планера, убедился сам, когда общался с сотрудниками в Институте океанологии им. Ширшова РАН в Москве.
К работе над подводным автономным аппаратом Максима подключил его научный руководитель Антон Варюхин, теперь — заместитель руководителя лаборатории. Задача оказалась нетривиальной. Ребятам предстояло решить множество теоретических и инженерных проблем. Они изучили различные конструкции подводных аппаратов, описания которых доступны в интернете, и поняли, что могут предложить устройство получше. Рассчитали оптимальную форму аппарата — наподобие обтекаемого с обоих концов корпуса самолета. Вычислили траекторию движения, напоминающую синусоиду, чтобы аппарат тратил меньше энергии. Для этого к корпусу нужно прикрепить крылья с обеих сторон. Тогда он сможет плавно скользить в воде, используя подъемную силу крыла, как планер.
Устройство подводного планера
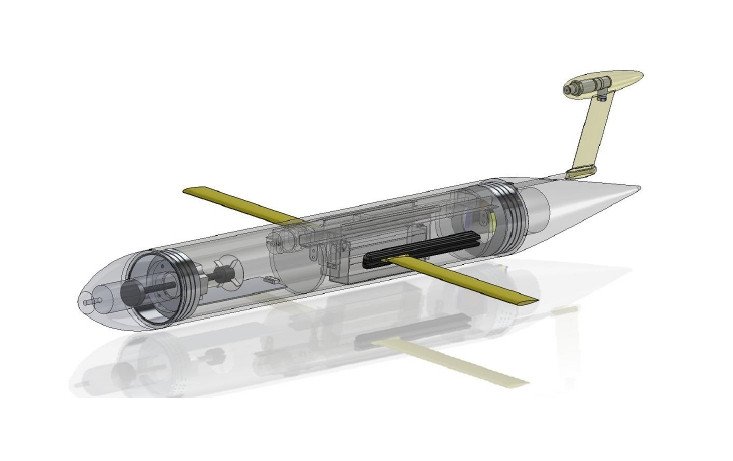
Корпус планера состоит из трех частей — центральной капсулы из дюралюминия и двух концевых обтекателей из стеклопластика. Такая конструкция обеспечивает герметичность. Внутри находится балластная система поршневого типа, аккумулятор, инерциальный навигационный блок, датчик давления, GPS, радиомодем. При длине 1,2 метра, робот весит 11 кг. Корпус покрыт стекловолокном и покрашен в желтый цвет.
— Чтобы отпугивать хищников, — пошутил Максим. На самом деле, яркий цвет нужен, чтобы без труда заметить робота в воде во время испытания.
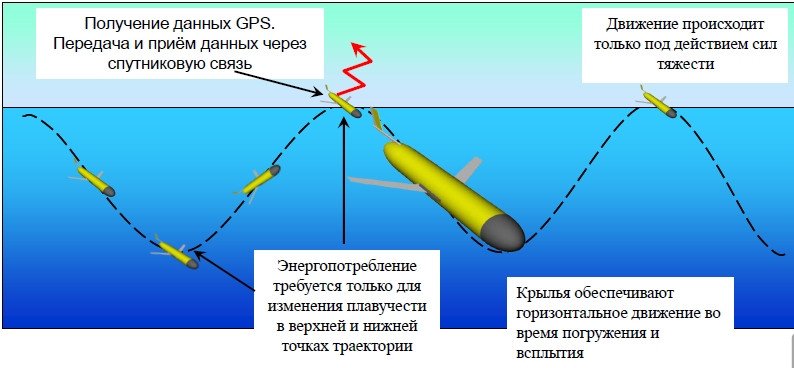
Планер движется за счет изменения плавучести. Изначально, перед спуском, он лежит на поверхности воды в равновесии. Затем он начинает набирать во внутреннюю капсулу воду и тонуть. Подъемная сила крыла придает горизонтальное направление движению и заставляет планер скользить плавно в глубину под углом 18 градусов, пока он не достигнет расчетной отметки — о чем его предупреждает датчик давления. Затем аппарат начинает выпускать воду и всплывать также плавно, как и тонул. На поверхности он устанавливает связь со спутником и передает данные наблюдений. После всплытия его можно перенастроить, скорректировать ему курс. Ученые рассчитали, что так погружаясь и всплывая, планер может курсировать в океане месяцами. Энергия требуется ему только для изменения плавучести в верхних и нижних точках траектории. У него нет изнашивающихся частей, поэтому промежуточный ремонт ему не нужен. Рабочий прототип плавает в воде без подзарядки две недели, а с аккумулятором большей емкости протянет месяца два.
Разработчики понимают, что в океане аппарат поджидают множество нестандартных ситуаций — он может запутаться в сетях, водорослях, напороться на что-то при всплытии и т.д. Одно из решений — установить сзади винт, который будет включаться в критический момент, чтобы робот попытался уйти от опасности. Остаются и нерешенные проблемы. Например, как работать подо льдом — ведь всплыть на поверхность он не сможет.
Подводный планер испытали в гидроканале ЦАГИ. Глубина там 6 метров, дно бетонное и идеально ровное, нет течений, рыб и водорослей. Аппарат хорошо себя показал, и летом Максим с коллегами повезут его на Волгу, испытать в реальных условиях.
Группа подводных беспилотников
Первую версию подводного планера делали два года. Максим Овдиенко защитил по ней диплом и теперь учится в аспирантуре лаборатории автоматических систем МТФИ. Лаборатория молодежная, организовали ее совсем недавно — в октябре 2014 года, специально для разработки морских роботов. Это одна из лабораторий, созданная по проекту 5-100, цель которого вывести пять российских вузов в сотню лучших университетов мира к 2020 году. Руководит ей молодой ученый Сергей Колчев.
Недавно Максим получил финансирование по программе УМНИК от Фонда содействия развитию малых форм предприятий в научно-технической сфере. В течение двух лет он получит 400 тысяч рублей на доработку подводного планера и подготовку стартапа — коммерческой фирмы, которая будет заниматься серийным производством аппаратов.
Рынок у подводных планеров — глобальный, интерес океанологов к ней высокий, а стоимость продукта можно снизить за счет разных оптимизаций. Постройка одного аппарата обойдется в один миллион рублей, рассказал Максим на Форуме наукоградов 18 декабря 2014 года. Эксперты, оценивавшие проект, ему не поверили.
— Только зарплата одного разработчика с налогами обойдется тебе в миллион рублей в год, — заметил Виталий Полехин, руководитель клуба инвесторов «Сколково».
Максим рассуждает несколько иначе. Для него работа над планером — все еще продолжение научных исследований, поддерживаемых, в первую очередь, вузом технически и финансово. Коммерческий этап впереди — оформление патента, регистрация малого предприятия, реклама, поиск покупателей. Несколько членов команды разработчиков получили образование в области инновационного предпринимательства, включая самого Максима. За два с половиной года, что существует проект «подводный планер», его команда постепенно выросла с 2 до 14 человек.
— Сегодня такой командой мы способны и планер сделать более высокого класса, и создать целую систему глобального мониторинга морей и океанов, состоящую из плавающих и летающих роботов, — пояснил Максим Овдиенко в письме.
Рабочий образец планера, больше и тяжелее прототипа, ученые могут собрать уже сейчас. Полезная нагрузка большого аппарата будет 10 кг, максимальная глубина погружения — 500 метров. Чтобы сделать аппарат более интеллектуальным, а значит, вложить в него больше приборов и увеличить тем самым вес, нужны дальнейшие испытания.
Но цели лаборатории простираются гораздо дальше одного автономного аппарата. Разработчики задумали сделать группу подводных планеров, управляемые из единого центра. Это позволит в сотни раз сэкономить на океанском мониторинге. Например, базовый управляющий центр может плавать на поверхности, а автономные планеры — под водой. Или они могли бы взаимодействовать друг с другом через систему буев. Представьте себе, стая беспилотников курсирует вдоль берегов, мониторит течения, радиоактивный фон океана, разные параметры воды, а может быть, выполняет и военные задачи.



























{kind=link}